Part IV – Experiments and Verifications
4 Experiments Confirming Einstein’s Theory
In this chapter we discuss a series of experiments that empirically support Einstein’s general theory of relativity. A central tool in the analysis of these experiments is the Schwarzschild solution of the Einstein field equations.
The following experiments are discussed:
- The Hafele–Keating experiment (see Chapter 4.1)
- The motion of particles in a gravitational field (see Chapter 4.2)
- The deflection of light near massive bodies (see Chapter 4.3)
- The precession of planetary perihelia, especially Mercury (see Chapter 4.4)
- The Shapiro time delay (see Chapter 4.5)
- The calculation of the trajectory of a projectile in a strong gravitational field (see Chapter 4.8)
Together, these experiments form powerful evidence for the validity of the general theory of relativity. In each case, the Schwarzschild metric provides a mathematical framework that accurately explains the observed phenomena.
4.1 Experiment 1 – The Hafele & Keating Experiment with the Schwarzschild Equation
Derivation based on: A Hafele & Keating-like thought experiment, by Paul B. Andersen, 16 October 2008 (Andersen, 2008).
The famous Hafele–Keating experiment tested quantitative predictions of relativity, particularly time dilation due to both motion (special relativity) and gravity (general relativity).
In this experiment, two airplanes were equipped with cesium clocks and flown simultaneously around the Earth in opposite directions. A third cesium clock remained at a fixed location on Earth (in Washington). The results showed that the clocks on board experienced different time dilation effects depending on their direction of motion and their position relative to Earth.
The clock in the eastward‑flying aircraft moved with the rotation of the Earth. As a result, this clock had a higher speed relative to the non‑rotating center of the Earth than the ground clock. This led to stronger time dilation: the clock lagged behind.
Conversely, the westward‑flying aircraft moved against the rotation of the Earth, resulting in a lower speed relative to the Earth’s center, and thus weaker time dilation: this clock ran ahead. This difference in elapsed time demonstrates that the passage of time depends on the motion of the observer — an effect predicted by Einstein in 1905 in his original paper on special relativity.

Source: (Crowell, 11 March 2018)
Purpose and Setup
- Purpose: Direct experimental test of Einstein’s predictions for time dilation due to both motion (special relativity) and gravity (general relativity).
- Setup: Cesium clocks were flown eastward and westward around the Earth, while a reference clock remained on the ground. The time differences between these clocks were measured and compared with theoretical predictions.
Theoretical Framework: Schwarzschild Metric
The Schwarzschild metric describes spacetime outside a spherically symmetric massive body such as the Earth:
The Schwarzschild metric is:
\[ c^2 d\tau^2=\left(1-\frac{2GM}{ c^2r}\right) dt^2-\left(1-\frac{2GM}{ c^2r} \right)^{-1} dr^2-r^2 d\theta^2-r^2 \sin^2\theta \, d\phi^2 \tag{1} \]Here:
- t: the coordinate time, measured by a hypothetical clock far from any gravitational field;
- τ: the proper time, measured by a co‑moving clock at position r;
- r: distance from the center of the Earth;
- θ: latitude angle relative to the North Pole;
- ∅: longitude angle relative to a fixed meridian;
- G: the gravitational constant;
- M: the mass of the Earth;
- c: the speed of light.
The Schwarzschild metric uses a universal (spherical) coordinate system with its origin at Earth’s center of mass. The Earth rotates within this coordinate system. Changes in the angles θ and ∅ describe motion across the Earth’s surface.
Small changes in time and space are denoted by dt, dr, dθ and d∅. Note that dt is the time change for a hypothetical observer far from gravitational influences; it is not a directly measured time but a theoretical coordinate time.
The actual time measured by a clock at a given location is dτ, the proper time.
We will use the Schwarzschild metric to derive an approximate formula describing the time dilation of the clocks, based on their position and motion. We will then also provide the full (exact) solution. Although the latter is more complex, it can be handled using computer programs such as Excel and yields an accurate result.
4.1.1 Approximate Formula for Time Dilation
We approximate the situation in which the clocks move in circular orbits around the Earth: either at sea level or at some altitude above the Earth’s surface. Because the orbits are circular, dr = 0. Moreover, we assume the motion takes place in the equatorial plane, so θ = π/2 is constant and thus dθ = 0.
With this, the Schwarzschild metric simplifies to:
\[ c^2 d\tau^2=\left(1 - \frac{2GM}{c^2 r}\right) c^2 dt^2-r^2 d\phi^2 \tag{2} \]Dividing by \(c^2\) gives:
\[ d\tau^2=\left(1 - \frac{2GM}{c^2 r}\right) dt^2-\frac{r^2}{c^2} \left(\frac{d\phi}{dt} \right)^2 dt^2 \tag{3} \]Using the definition of orbital speed \(v=r \frac{d\phi}{dt}\), we obtain:
\[ d\tau=\sqrt{1 - \frac{2GM}{c^2 r} - \frac{v^2}{c^2}}\, dt \tag{4} \]Because the terms \(\frac{2GM}{c^2r}\) and \(\frac{v^2}{c^2}\) are very small compared to 1, we apply a first‑order Taylor approximation:
\[ d\tau\approx\left(1-\frac{GM}{c^2 r}-\frac{v^2}{2c^2}\right)dt \tag{5} \]Since \(r\) and \(v\) are constant, we can integrate directly:
\[ \tau=\left(1-\frac{GM}{c^2 r}-\frac{v^2}{2c^2}\right) t+\tau_0 \tag{6} \]We now compare two clocks. Clock 1 is located on the Earth’s surface, with radius \(r_1\), the distance from Earth’s center, and speed \(v_1\), due to Earth’s rotation. For this clock:
\[ d\tau_1=\left(1-\frac{GM}{c^2 r_1}-\frac{v_1^2}{2c^2}\right)dt \tag{7} \]For clock 2, for example in an airplane at altitude \(h\), with radius \(r_2\) and speed \(v_2\), we have:
\[ d\tau_2=\left(1-\frac{GM}{c^2 r_2}-\frac{v_2^2}{2c^2}\right)dt \tag{8} \]The ratio between the two time intervals becomes:
\[ d\tau_2=\frac{1 - \frac{GM}{c^2 r_2} - \frac{v_2^2}{2c^2}}{1 - \frac{GM}{c^2 r_1} - \frac{v_1^2}{2c^2}}\, d\tau_1 \]Using the approximation: \[ (1-\varepsilon)^{-1} \approx 1+\varepsilon, \] we obtain:
\[ d\tau_2 \approx \left( 1 - \frac{GM}{c^2 r_2} - \frac{v_2^2}{2c^2} \right) \left( 1 + \frac{GM}{c^2 r_1} + \frac{v_1^2}{2c^2} \right) d\tau_1 \]
\[ d\tau_2 \approx \left[ 1 + \frac{GM}{c^2 r_1} + \frac{v_1^2}{2c^2} - \frac{GM}{c^2 r_2}\left( 1 + \frac{GM}{c^2 r_1} + \frac{v_1^2}{2c^2} \right) - \frac{v_2^2}{2c^2}\left( 1 + \frac{GM}{c^2 r_1} + \frac{v_1^2}{2c^2} \right) \right] d\tau_1 \]
Since the terms \(\frac{GM}{c^2 r_1}, \frac{v_1^2}{2c^2}, \frac{GM}{c^2 r_2}, \frac{v_2^2}{2c^2}\) are very small, their products can be neglected. This yields:
\[ d\tau_2 \approx \left[ 1 + \frac{GM}{c^2}\left(\frac{1}{r_1}-\frac{1}{r_2}\right) + \frac{v_1^2 - v_2^2}{2c^2} \right] d\tau_1 \tag{9} \]
If we assume that both clocks start at \(\tau_1 = \tau_2 = 0\), then the integration is straightforward:
\[ \tau_2 \approx \left[ 1 + \frac{GM}{c^2}\left(\frac{1}{r_1}-\frac{1}{r_2}\right) + \frac{v_1^2 - v_2^2}{2c^2} \right] \tau_1 \tag{10} \]
Comparison Between Clocks
For a clock on Earth’s surface \((r_1, v_1)\) and a clock in an airplane \((r_2, v_2)\):
\[ \tau_2 - \tau_1 \approx \left[ \frac{GM}{c^2}\left(\frac{1}{r_1}-\frac{1}{r_2}\right) + \frac{v_1^2 - v_2^2}{2c^2} \right]\tau_1 \tag{11} \]
Suppose clock 1 is located on Earth’s surface with radius \(R\), and clock 2 is in an airplane at altitude \(h\). Then \(r_2 = R + h\). Since \(h \ll R\), we may approximate:
\[ \frac{1}{R} - \frac{1}{R+h} \approx \frac{h}{R^2} \quad\Rightarrow\quad \frac{GM}{c^2}\left(\frac{1}{R}-\frac{1}{R+h}\right) \approx \frac{gh}{c^2} \]
Thus:
\[ \tau_2 - \tau_1 \approx \left[ \frac{GM}{c^2}\left(\frac{1}{R}-\frac{1}{R+h}\right] + \frac{v_1^2 - v_2^2}{2c^2} \right)\tau_1 \tag{12} \]
If we assume that \(h/R \ll 1\) and \(g = GM/R^2\), then:
\[ \tau_2 - \tau_1 = \left( \frac{gh}{c^2} - \frac{v_2^2 - v_1^2}{2c^2} \right)\tau_1 \tag{13} \]
Since \(v_1 = v_{\text{earth}}\) (Earth’s rotational speed) and \(v_2 = v_{\text{plane}} + v_{\text{earth}}\), we obtain:
\[ v_1^2 - v_2^2 = v_{\text{earth}}^2 - (v_{\text{plane}} + v_{\text{earth}})^2 = -v_{\text{plane}}^2 - 2 v_{\text{earth}} v_{\text{plane}} \]
Substituting into (13) gives:
\[ \tau_{\text{plane}} - \tau_{\text{earth}} = \left( \frac{gh}{c^2} - \frac{v_{\text{plane}}(v_{\text{plane}} + 2v_{\text{earth}})}{2c^2} \right)\tau_{\text{earth}} \tag{14} \]
This equation is fully derived from the Schwarzschild metric with a few approximations. It matches the approximation used in the original Hafele–Keating experiment.
Remark 1. If the airplane’s speed is interpreted as ground speed, then at altitude \(h\) we may approximate:
\[ v_2=\frac{R + h}{R}\left(v_{\text{plane}} + v_{\text{earth}}\right) \]In that case, the above formula must be adjusted accordingly.
Remark 2. A more precise treatment of \(v_1\) and \(v_2\) follows in the next chapter, where the velocities are derived more explicitly based on the chosen coordinate system.
4.1.2 Derivation of v1 and v2 in Equation (13)
The velocity \(v_1\) in equation (3.1.1.13) is the velocity of a stationary point on the equator of Earth’s surface. It is expressed as:
\[ v_1 = r_1 \frac{d\phi}{dt} \]where dt is the coordinate time in the “universal” reference frame. However, measurements on Earth’s surface are made with respect to local proper time \(\tau\), so a conversion is required.
Using the chain rule:
\[ v_{1,t}= r_1 \frac{d\phi}{dt}= r_1 \frac{d\phi}{d\tau} \frac{d\tau}{dt}= v_{1,\tau} \frac{d\tau}{dt}\tag{14a} \]We now use the Schwarzschild metric (in the equatorial plane with \(dr = 0\)) to determine \(\frac{d\tau}{dt}\):
\[ c^2 d\tau^2=\left(1 - \frac{2GM}{c^2 r_1}\right)c^2 dt^2- r_1^2 \left(\frac{d\phi}{d\tau} \right)^2 d\tau^2 \]Rearranging:
\[ \left[1 + \frac{r_1^2}{c^2}\left(\frac{d\phi}{d\tau}\right)^2 \right] d\tau^2=\left(1 - \frac{2GM}{c^2 r_1}\right) dt^2 \]We define:
\[ \sigma^2 = 1 - \frac{2GM}{c^2 r} \]Then:
\[ \left(1 + \frac{v_{1,\tau}^2}{c^2}\right) d\tau^2= \sigma_1^2 dt^2 \] \[ \left(\frac{d\tau}{dt}\right)^2=\frac{\sigma_1^2}{1 + \frac{v_{1,\tau}^2}{c^2}}\tag{14b} \]Substituting into equation (14a):
\[ v_{1,t}^2=v_{1,\tau}^2\left(\frac{d\tau}{dt}\right)^2=v_{1,\tau}^2\frac{\sigma_1^2}{1 + \frac{v_{1,\tau}^2}{c^2}} \]This expression shows that \(\frac{d\tau}{dt}\), the conversion between coordinate time and proper time, depends on Earth’s rotational speed \(v_{1,\tau}\), measured in local proper time.
Now consider an airplane flying eastward. The total speed at Earth level (measured in proper time) is:
\[ v_{1\tau \text{_plane}}=v_{\text{plane_}\tau}+v_{1\tau \text{_earth}}=r_1 \frac{d\phi}{d\tau} \]where:
- \(v_{\text{plane_}\tau}\): airplane speed relative to Earth’s surface
- \(v_{1\tau \text{_earth}}\): Earth’s rotational speed
Angular Velocity in the Universal Frame
The corresponding angular velocity in the universal frame is:
\[ r_1 \frac{d\phi}{dt} = r_1 \frac{d\phi}{d\tau}\frac{d\tau}{dt} = \left( v_{\text{plane_}\tau}+v_{1\tau \text{_earth}} \right) \frac{d\tau}{dt} \]
\[ \frac{d\tau}{dt} = \frac{\sigma_1}{\sqrt{\left(1 + \frac{v_{1\tau\text{_earth}}^{2}}{c^{2}}\right)}} \]
\[ \frac{d\phi}{dt} =\left( v_{\text{plane_}\tau}+v_{1\tau \text{_earth}} \right) \frac{\sigma_1}{r_1\sqrt{\left(1 + \frac{v_{1\tau\text{_earth}}^{2}}{c^{2}}\right)}} \]
Here we have computed the rotational speed (angular velocity) in the universal frame. This is valid at any level, i.e., any distance from the center. But the actual speed is determined by r times this angular velocity.
Speed at the Airplane’s Altitude
\( v_{\text{plane},\tau} \) is the measured airplane speed at ground level relative to proper time, the only available time at that level. \( v_{\text{earth},\tau} \) is the rotational speed of a stationary point on Earth relative to the universal frame, but measured in proper time at Earth level.
The airplane’s speed in the universal frame at altitude \( r_2 \) is:
\[ v_{2t}=r_2 \frac{d\phi}{dt}=\frac{r_2}{r_1}\frac{\sigma_1}{\sqrt{1 + \frac{v_{1\tau \text{_earth}}^2}{c^2}}}\left( v_{\text{plane_}\tau}+v_{1\tau \text{_earth}} \right) \]We split this speed into an “Earth rotation” and an “airplane” component:
\[ v_{2t} = v_{2t\text{_earth}} + v_{2t\text{_plane}} \]
With:
\[ v_{2t\text{_earth}} = \frac{r_2}{r_1}\, \frac{\sigma_1 v_{1\tau\text{_earth}}}{\sqrt{1 + \frac{v_{1\tau\text{_earth}}^2}{c^2}}} \]
And:
\[ v_{2t\text{_plane}} = v_{2t} - v_{2t\text{_earth}} = \frac{r_2}{r_1}\, \frac{\sigma_1 v_{\text{plane_}\tau}}{\sqrt{1 + \frac{v_{1\tau\text{_earth}}^2}{c^2}}} \]
Summary of the Result:
The conversion of speed at Earth level to the universal frame:
\[ v_{1t\text{_earth}} = v_{1\tau\text{_earth}} \, \frac{\sigma_{\text{earth}}}{1 + \sqrt{\frac{v_{1\tau\text{_earth}})^2}{c^2}}} \tag{15} \]
The speed \( v_2 \) of the airplane in the universal frame is:
\[ v_{2t} = \frac{r_2}{r_1}\, \frac{ \sigma_{\text{earth}}\left(v_{\text{plane_}\tau} + v_{\text{earth_}\tau}\right) }{ \sqrt{1 + \frac{v_{1\tau\text{_earth}}^2}{c^2}} } \tag{16} \]
Substitution into equation (3.1.1._13):
\[ \tau_2 - \tau_1 = \left( \frac{gh}{c^2} - \frac{v_2^2 - v_1^2}{2c^2} \right) \tau_1 \tag{13} \]
becomes:
\[ \tau_2 - \tau_1 = \left( \frac{gh}{c^2} - \frac{ \sigma_{\text{earth}}^2 }{ 1 + \frac{(v_{1\tau\text{_earth}})^2}{c^2} } \cdot \frac{1}{2c^2} \left[ \left( \frac{R+h}{R} \right)^2 \left( v_{\tau\text{_plane}} + v_{\tau\text{_earth}} \right)^2 - v_{1\tau\text{_earth}}^2\right]\right) \;\tau_1 \tag{17} \]
This equation describes the time dilation between a clock on Earth’s surface and a clock aboard an airplane, accounting for both gravitational and velocity‑dependent effects, all based on locally measurable quantities.
4.1.3 The Exact Derivation
Instead of an approximation, we now perform an exact derivation, fully based on the Schwarzschild metric. We begin with equation (4):
Since \( r \) and \( v \) are constant, the integration is straightforward:
The goal is to compare the proper time of different clocks. As a reference we take the clock on Earth’s surface. Other clocks are located in airplanes, at higher altitude and with different speeds. Even the clock on Earth has a non‑zero speed due to Earth’s rotation.
For the clock on Earth’s surface (radius \( r_1 \), speed \( v_1 \)):
For the clock in the airplane (radius \( r_2 \), speed \( v_2 \)):
To find the ratio between the two proper times, we divide these expressions:
With equal initial times \( \tau_2(0) = \tau_1(0) = 0 \), the solution is:
Time Difference Between Two Clocks
Assume \( r_1 = R \), the radius of the Earth, and \( r_2 = R + h \), the altitude of the aircraft, then this becomes:
Velocities and gravitational effects
In this expression:
- \( v_1 \) is the rotational velocity of a point on the Earth’s surface (eastward),
- \( v_2 \) is the velocity of the aircraft relative to the universal reference frame.
Both velocities were previously derived in equations 14b and 15b of section 4.1.5.
Using the Schwarzschild radius \( R_s = \frac{2GM}{c^2} \), we rewrite this as:
Conclusion
This equation is an exact expression, derived directly from the Schwarzschild metric. It shows how the difference in proper time between a clock on Earth and a clock in an aircraft is influenced by:
- Gravitational time dilation: clocks at higher altitude (weaker gravity) run faster.
- Kinematic time dilation: clocks moving faster run slower.
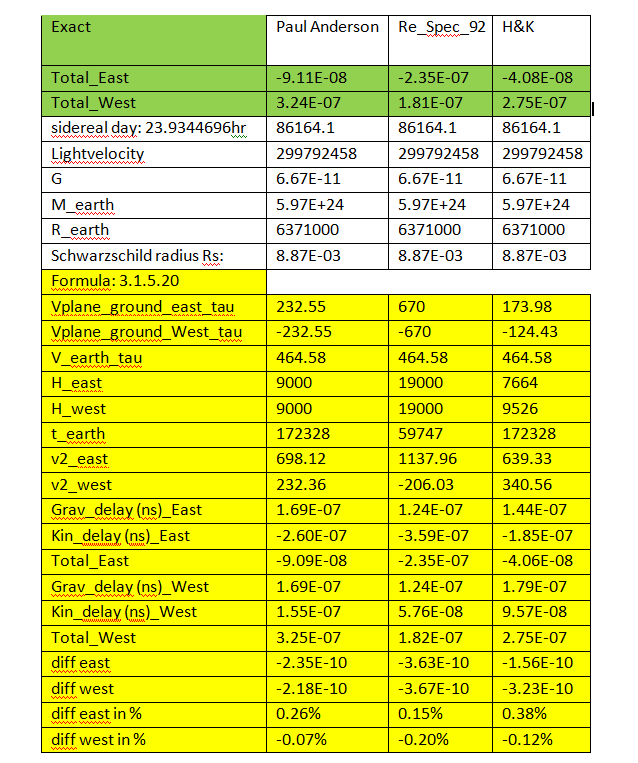
Calculations based on the performed experiments:
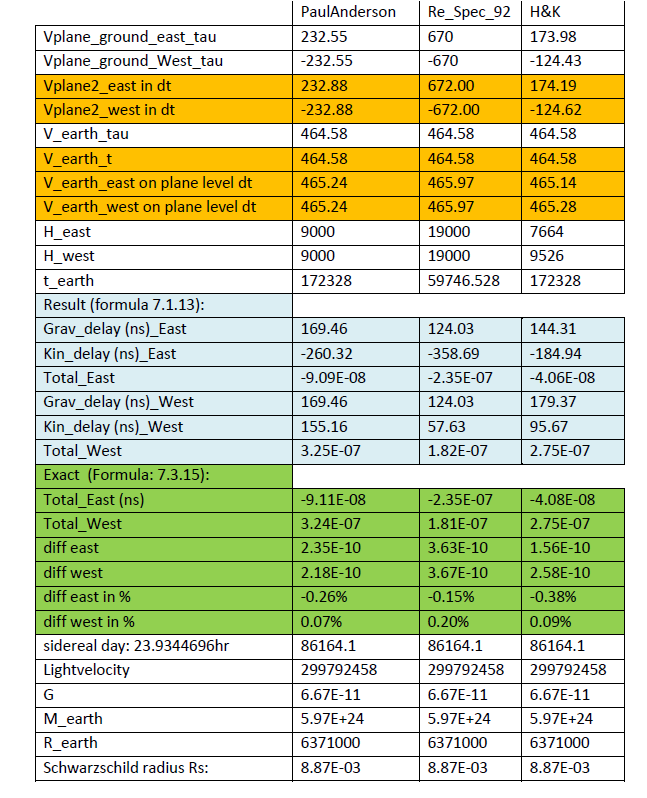
Conclusion
The approximations are correct within an accuracy of 0.4%.
Practical Application
- Earth’s rotational speed (equator): \( v_{\text{earth}} \) is approximately 464.58 m/s (based on the sidereal day).
- Aircraft: Speed relative to the Earth’s surface, corrected for altitude.
- Altitude effect: \( h \) is typically several kilometres, \( R \) (Earth) approximately \( 6.371 \times 10^{6}\,\text{m} \).
Results and Interpretation
- Eastward‑flying clock: Higher speed relative to Earth’s centre → stronger kinematic time dilation → clock runs slower.
- Westward‑flying clock: Lower speed relative to Earth’s centre → weaker time dilation → clock runs faster.
- Gravitational effect: Clocks at higher altitude (aircraft) run faster due to weaker gravity.
Experimental Outcome
- The measured time differences matched the predictions of general relativity with an accuracy better than 0.4%.
- Both the approximate and exact formulas (derived from the Schwarzschild metric) agree with observations.
Summary
- The Hafele–Keating experiment is a direct, quantitative confirmation of Einstein’s relativity.
- The Schwarzschild metric provides the mathematical framework for explaining these time‑dilation effects.
- Both effects — motion and gravity — are essential and are measured and explained simultaneously.
4.1.4 The velocity of a stationary point on the equator at Earth’s surface
To compute the velocity of a stationary point on the equator, we must first determine the Earth’s rotation period: the sidereal day.
Sidereal day versus solar day
A normal day or solar day (24 hours) is the time between two consecutive noons. This time is based on the Sun’s apparent motion, not on Earth’s actual rotation.
Because the Earth orbits the Sun, it makes one extra rotation per year relative to the fixed stars. In one year (365.25 solar days), the Earth therefore rotates 366.25 times relative to the stars.
From this follows the duration of one sidereal day:
\[ T_{\text{sidereal}}=\frac{365.25}{366.25}\cdot24\cdot3600=86164.1\ \text{s} \]
Converted:
\[ \frac{86164.1}{3600}=23.93447\ \text{hours} \]
That is: 23 hours, 56 minutes and 4 seconds.
Velocity at the equator
With the Earth’s radius:
\[ R = 6371\ \text{km}=6.371 \times 10^{6}\ \text{m}, \]
we compute the equatorial circumference:
\[ \text{Circumference}=2\pi R=2\pi \times 6.371 \times 10^{6}\approx4.003 \times 10^{7}\ \text{m}. \]
The velocity of a stationary point on the equator (relative to a non‑rotating reference frame) is:
\[ v_{\text{earth}}=\frac{2\pi R}{T_{\text{sidereal}}}=\frac{4.003\times 10^{7}}{86164.1}=464.58\ \text{m/s}. \]
For comparison: if we incorrectly used a 24‑hour day:
\[ v=\frac{2\pi R}{86400}=463.3\ \text{m/s}. \]
Summary
- A sidereal day lasts approximately 23 hours, 56 minutes and 4 seconds.
- The velocity of a stationary point on the equator is about 464.58 m/s.
- The difference between a sidereal and solar day leads to a measurable difference in velocity, important for relativistic calculations such as in the Hafele–Keating experiment.
4.1.5 Correction to derivation based on Paul Anderson
In Anderson’s original derivation, the velocity of the aircraft is inserted relative to the Earth’s surface. However, in his formula 3.1.1.3 this velocity is expressed with respect to coordinate time \(dt\), while clocks in motion measure proper time \(d\tau\). This requires a correction: the velocity of the object must be expressed relative to its own clock, i.e. via \(d\tau\).
Starting point: The full Schwarzschild relation
We take as starting point equation 2 from section 4.1.1, without approximation:
\[ c^{2}\,d\tau^{2} = \left(1 - \frac{2GM}{c^{2}r}\right)c^{2}\,dt^{2} - r^{2}\,d\phi^{2} \tag{2} \]Dividing by \(c^{2}\) gives:
\[ d\tau^{2} = \left(1 - \frac{2GM}{c^{2}r}\right)dt^{2} - \frac{r^{2}}{c^{2}}\left(\frac{d\phi}{d\tau}\right)^{2}d\tau^{2} \tag{3b} \]We rewrite this as:
\[ d\tau^{2} \left(1 + \frac{r^{2}}{c^{2}}\left(\frac{d\phi}{d\tau}\right)^{2}\right)= \left(1 - \frac{2GM}{c^{2}r}\right)dt^{2} \tag{3c} \]And therefore:
\[ d\tau = \sqrt{ \frac{1 - \dfrac{2GM}{c^{2}r}} {1 + \dfrac{r^{2}}{c^{2}}\left( \dfrac{d\phi}{d\tau}\right)^{2}} }\,dt \tag{4b} \]With:
\[ v_{\tau} = r\,\frac{d\phi}{d\tau} \tag{4c} \]Thus:
\[ d\tau_{1} = \sqrt{ \frac{1 - \dfrac{2GM}{c^{2}r_{1}}}{1 + \dfrac{v_{1}^{2}}{c^{2}}}}\,dt \tag{7b} \] \[ d\tau_{2} =\sqrt{ \frac{1 - \dfrac{2GM}{c^{2}r_{2}}} {1 + \dfrac{v_{2}^{2}}{c^{2}}}}\,dt \tag{8b} \]We then write:
\[ d\tau_{2}=\sqrt{\frac{1 - \dfrac{2GM}{c^{2}r_{2}}}{1 + \dfrac{v_{2}^{2}}{c^{2}}}}\sqrt{ \frac{1 + \dfrac{v_{1}^{2}}{c^{2}}}{1 - \dfrac{2GM}{c^{2}r_{1}}}}\,d\tau_{1} \tag{9b} \]From this follows the relation between both proper times:
\[ \tau_{2}=\sqrt{\frac{1 - \dfrac{2GM}{c^{2}r_{2}}}{1 + \dfrac{v_{2}^{2}}{c^{2}}}}\sqrt{ \frac{1 + \dfrac{v_{1}^{2}}{c^{2}}}{1 - \dfrac{2GM}{c^{2}r_{1}}}}\,\tau_{1} \tag{10b} \]If we take \(\tau_{1} = \tau_{\text{earth}}\) (clock at sea level) and \(\tau_{2} = \tau_{\text{plane}}\), this becomes:
\[ \tau_{\text{plane}} - \tau_{\text{earth}} =\left[\sqrt{\frac{1 - \dfrac{2GM}{c^{2}r_{2}}}{1 + \dfrac{v_{2}^{2}}{c^{2}}}}\sqrt{\frac{1 + \dfrac{v_{1}^{2}}{c^{2}}}{1 - \dfrac{2GM}{c^{2}r_{1}}}}- 1\right]\tau_{\text{earth}} \tag{11b} \]Here \(r_{1} = R\), the radius of the Earth. The distance of the clock in an aircraft is then \(R + h\). We obtain:
\[ \tau_{\text{plane}} - \tau_{\text{earth}}=\left[\sqrt{\frac{1 - \dfrac{2GM}{c^{2}(R + h)}} {1 + \dfrac{v_{\text{earth}}^{2}}{c^{2}}}}\sqrt{\frac{1 + \dfrac{v_{2}^{2}}{c^{2}}}{1 - \dfrac{2GM}{c^{2}R}}}- 1\right]\tau_{\text{earth}} \tag{14b} \]Or with Schwarzschild radius \(R_{s} = \dfrac{2GM}{c^{2}}\):
\[ \tau_{\text{plane}} - \tau_{\text{earth}}=\left[\sqrt{\frac{1 - \dfrac{R_{s}}{R + h}} {1 + \dfrac{v_{\text{earth}}^{2}}{c^{2}}}}\sqrt{\frac{1 + \dfrac{v_{2}^{2}}{c^{2}}}{1 - \dfrac{R_{s}}{R}}}- 1\right]\tau_{\text{earth}} \tag{15b} \]Relative velocity at flight altitude
The ground speed of the aircraft (relative to the Earth’s surface) must be converted into a coordinate‑independent velocity at flight altitude:
\[ v_{2}=\left(v_{\text{earth}} + v_{\text{plane (relative to earth point)}}\right)\cdot \frac{R + h}{R} \]Up to this point the formula is exact, without approximations.
After first‑order Taylor approximations of equation (14b), as done earlier, the result becomes:
\[ \tau_{\text{plane}} - \tau_{\text{earth}}=\left(\left[1 - \frac{GM}{c^{2}(R + h)}\right]\left[1 + \frac{GM}{c^{2}R}\right]\left[1 + \frac{v_{\text{earth}}^{2}}{2c^{2}}\right]\left[1 - \frac{v_{2}^{2}}{2c^{2}}\right]- 1\right)\tau_{\text{earth}} \tag{16} \]This can be rewritten as:
\[ \tau_{\text{plane}} - \tau_{\text{earth}}=\left(\left[1 + \frac{GM}{c^{2}}\left(\frac{1}{R} - \frac{1}{R + h}\right)\right]\left[1 + \frac{v_{\text{earth}}^{2} - v_{2}^{2}}{2c^{2}} \right]- 1\right)\tau_{\text{earth}} \tag{17} \] \[ \tau_{\text{plane}} - \tau_{\text{earth}}=\left(\left[1 + \frac{GM}{c^{2}}\frac{h}{R^{2}}\right] \left[1 + \frac{v_{\text{earth}}^{2} - v_{2}^{2}}{2c^{2}}\right]- 1\right)\tau_{\text{earth}} \tag{18} \] \[ \tau_{\text{plane}} - \tau_{\text{earth}}=\left(\frac{GM}{c^{2}}\frac{h}{R^{2}}+ \frac{v_{\text{earth}}^{2} - v_{2}^{2}}{2c^{2}}\right)\tau_{\text{earth}} \tag{19} \]With \(g = \dfrac{GM}{R^{2}}\) it follows:
\[ \tau_{\text{plane}} - \tau_{\text{earth}}=\left(\frac{gh}{c^{2}}- \frac{v_{2}^{2} - v_{\text{earth}}^{2}}{2c^{2}}\right)\tau_{\text{earth}} \tag{20} \]Remark on velocities and reference frames
The aircraft’s velocity is given as ground speed. It is not immediately clear whether this is measured relative to the Earth clock or the aircraft clock. Let us assume the Earth clock is meant. In that case we must convert to the level of the aircraft, meaning we must consider the clock at that altitude. We do this via the time \(t\) in the universal frame.
If we consider \(\dfrac{d\phi_{\text{earth}}}{dt}\), this is the rotational speed of the Earth in the universal frame. We obtain the Earth’s speed at sea level by multiplying \(\dfrac{d\phi_{\text{earth}}}{dt}\) by \(R\), the distance from the center. The speed of the Earth as seen from aircraft altitude is \((R + h)\dfrac{d\phi_{\text{earth}}}{dt}\). For the aircraft the same applies: at sea level the relative aircraft speed is \(R\dfrac{d\phi_{\text{plane}}}{dt}\) and at aircraft altitude \((R + h)\dfrac{d\phi_{\text{plane}}}{dt}\).
Now we must find \(\dfrac{d\phi_{\text{earth}}}{dt}\) and \(\dfrac{d\phi_{\text{plane}}}{dt}\). We use from section 4.1.5 equation (4c):
\[ v_{\tau} = r\,\frac{d\phi}{d\tau}= r\,\frac{d\phi}{dt}\,\frac{dt}{d\tau}\;\Rightarrow\; \frac{d\phi}{dt}= \frac{v_{\tau}}{r}\,\frac{d\tau}{dt} \]We then use from section 4.1.5 equation (3.1.5.4b):
\[ \frac{d\tau}{dt}=\sqrt{\frac{1 - \dfrac{2GM}{c^{2}r}}{1 + \dfrac{v_{\tau}^{2}}{c^{2}}}} \]Thus:
\[ \frac{d\phi}{dt} =\frac{v_{\tau}}{r}\frac{d\tau}{dt}=\frac{v_{\tau}}{r}\sqrt{\frac{1 - \dfrac{2GM}{c^{2}r}}{1 + \dfrac{v_{\tau}^{2}}{c^{2}}}} \]All components on the right-hand side are known.
At sea level:
\[ \frac{d\phi_{\text{earth}}}{dt}=\frac{v_{\text{earth}}}{R}\sqrt{\frac{1 - \dfrac{2GM}{c^{2}R}}{1 + \dfrac{v_{\text{earth}}^{2}}{c^{2}}}} \]And for the aircraft analogously:
\[ \frac{d\phi_{\text{plane}}}{dt}=\frac{v_{\text{plane}}}{R}\sqrt{\frac{1 - \dfrac{2GM}{c^{2}R}} {1 + \dfrac{v_{\text{earth}}^{2}}{c^{2}}}} \]Now at aircraft altitude:
\[ v_{2}=v_{2\tau\text{_earth}} + v_{2\tau\text{_plane}}=(R + h)\left(\frac{d\phi_{ \text{earth}}}{dt}+ \frac{d\phi_{\text{plane}}}{dt}\right) \]Thus:
\[ v_{2} = \frac{R+h}{R} \sqrt{ \frac{1 - \dfrac{2GM}{c^{2}R}} {1 + \dfrac{v_{\text{earth}}^{2}}{c^{2}}} } \left( v_{\text{earth}} + v_{\text{plane}} \right) \]Up to this point \(v_{2}\) was exact. With a first‑order Taylor approximation:
\[ v_{2}=\frac{R + h}{R}\sqrt{\left( 1 - \frac{GM}{c^{2}R}\right)\left(1 - \frac{v_{\text{earth}}^{2}}{2c^{2}} \right)}\left(v_{\text{earth}} + v_{\text{plane}}\right) \]Thus, the relevant formula is:
\[ v_{2}\approx\frac{R + h}{R}\left(1 - \frac{GM}{c^{2}R}- \frac{v_{\text{earth}}^{2}}{2c^{2}}\right) \left( v_{\text{earth}} + v_{\text{plane}}\right) \]Result after Taylor approximation
Applied to equation (14b), this leads after linearisation to:
\[ \tau_{\text{plane}} - \tau_{\text{earth}}=\left(\frac{gh}{c^{2}}- \frac{v_{2}^{2} - v_{\text{earth}}^{2}}{2c^{2}}\right)\tau_{\text{earth}} \]Conclusion
This revised approach corrects the inconsistency in the original derivation: velocities must be related to proper time, not coordinate time. After correction and Taylor approximation, the numerical deviation from the approximation in the previous chapter is less than \(0.4\%\) — well within the desired accuracy.
4.1.6 Considerations regarding the Hafele–Keating experiment and the Schwarzschild metric
We begin with the general Schwarzschild equation:
\[ ds^2 = c^2 d\tau^2 = \left(1 - \frac{2GM}{c^2 r}\right)c^2 dt^2 - \left(1 - \frac{2GM}{c^2 r}\right)^{-1} dr^2 - r^2 d\theta^2 - r^2 \sin^2\theta\, d\phi^2 \tag{1} \]
As used earlier, we define:
\[ \sigma =\sqrt{ 1 - \frac{2GM}{c^2 r}} \]
With this notation, equation (1) becomes:
\[ ds^2 = c^2 d\tau^2 = \sigma^2 c^2 dt^2 - \sigma^{-2} dr^2 - r^2 d\theta^2 - r^2 \sin^2\theta\, d\phi^2 \tag{1a} \]
In the Hafele–Keating experiment, the time of the clock at the United States Naval Observatory (USNO) and the velocity of an aircraft are measured. The question is: what do the time and velocity represent in the context of the Schwarzschild metric?
There is a stationary clock at sea level on the equator, and two aircraft moving in the equatorial plane — one eastward, the other westward. Both aircraft follow a circular path with constant speed relative to the Earth’s surface, but in opposite directions.
Since the experiment takes place in the equatorial plane, we assume that \(\theta = \pi/2\) is constant, and that \(r\) is also constant due to the circular orbit. The Schwarzschild metric then simplifies to:
\[ c^2 d\tau^2 = \left(1 - \frac{2GM}{c^2 r}\right)c^2 dt^2 - r^2 d\phi^2 \tag{2} \]
The coordinates \(t, r, \theta, \phi\) in the Schwarzschild metric can be interpreted as belonging to a universal (inertial) reference frame in which the Earth rotates. The clocks on the Earth’s surface and in the aircraft each reside in their own local inertial frame; their measured time is expressed as the proper time \(\tau\).
The universal coordinate time \(t\) is not directly measurable, but is a theoretical quantity. From equation (2) it follows:
\[ dt^2 = \frac{d\tau^2 + \frac{r^2}{c^2} d\phi^2}{1 - \frac{2GM}{c^2 r}} = \sigma^{-2}\left(d\tau^2 + \frac{r^2}{c^2} d\phi^2\right) = \sigma^{-2}\left(1 + \frac{r^2}{c^2}\left(\frac{d\phi}{d\tau}\right)^2\right)d\tau^2 \tag{4} \]
Under the assumption \(t = 0\) when \(\tau = 0\), this leads to:
\[ t =\sigma^{-1}\sqrt{1 + \frac{r^2}{c^2}\left(\frac{d\phi}{d\tau}\right)^2}\,\tau= \sigma^{-1}\sqrt{1 + \frac{v^2}{c^2}}\,\tau \tag{4a} \]
where \(v = r\, d\phi/d\tau\) is the velocity with respect to the universal frame.
For velocities much smaller than \(c\), we may apply a first‑order Taylor approximation:
\[ t = \sigma^{-1}\sqrt{1 + \frac{v^2}{c^2}}\,\tau = \frac{1}{\sigma\sqrt{1 - \frac{v^2}{c^2}}}\,\tau = \frac{\gamma}{\sigma}\, \tau \tag{4b} \]
with \[ \gamma =\frac{1}{ \sqrt{1 - \frac{v^2}{c^2}}} \] the Lorentz factor.
This equation expresses how the proper time \(\tau\) of a moving clock relates to the coordinate time \(t\) in the Schwarzschild frame.
4.2 Experiment 2 – Motion of Particles in Schwarzschild Geometry
The derivations in this chapter are based on:
- (Biesel, 2008) The Precession of Mercury’s Perihelion, Owen Biesel
- (Magnan) Christian Magnan: Complete calculations of the perihelion precession of Mercury and the deflection of light by the Sun in General Relativity
- (Pe’er, 2014) Asaf Pe’er: Schwarzschild Solution and Black Holes
We derive equations for the motion of particles in Schwarzschild geometry, as the basis for:
- The precession of Mercury’s perihelion,
- The deflection of light by the Sun,
- The Shapiro experiment,
- The calculation of a projectile trajectory.
We use the Schwarzschild metric as our starting point. Due to symmetry in both the time coordinate \( t \) and the angular coordinate \( \phi \) (no metric component depends on these coordinates), Noether’s theorem applies: every continuous symmetry corresponds to a conservation law. This yields conservation of energy and conservation of angular momentum.
Schwarzschild Metric
The metric reads:
\[ ds^2 = \sigma^2 c^2 dt^2 - \frac{dr^2}{\sigma^2} -\frac{r^2}{R^2_p} dR^2_p\,\theta^2 - \frac{r^2}{R^2_p} \sin^2\theta\, dR^2_p\,\phi^2 \]
To obtain the correct dimensions (all coordinates in meters), we set Rp = 1 m, making the coefficients dimensionless. This leads to the more familiar form:
\[ ds^2 = \sigma^2 c^2 dt^2 - \frac{dr^2}{\sigma^2} - r^2 d\theta^2 - r^2 \sin^2\theta\, d\phi^2 \tag{1a} \]
with:
\[ \sigma =\sqrt{ 1 - \frac{2GM}{c^2 r}} =\sqrt{ 1 - \frac{R_s}{r}}, \qquad R_s = \frac{2GM}{c^2} \]
Metric Coefficients
\[ g_{00} = \sigma^2,\quad g_{11} = -\frac{1}{\sigma^2},\quad g_{22} = -r^2,\quad g_{33} = -r^2 \sin^2\theta \]
Contravariant components:
\[ g^{00} = \frac{1}{\sigma^2},\quad g^{11} = -\sigma^2,\quad g^{22} = -\frac{1}{r^2},\quad g^{33} = -\frac{1}{r^2 \sin^2\theta} \]
Furthermore: \[ \frac{d\sigma}{dr} = \frac{R_s}{2 r^2 \sigma} \]
Derivatives of Metric Components
For the Schwarzschild metric with \(\sigma = 1 - \dfrac{R_s}{r}\) we find the following derivatives:
\[ \frac{\partial g_{00}}{\partial r} = \frac{R_s}{r^2}, \qquad \frac{\partial g_{11}}{\partial r} = \frac{R_s}{r^2 \sigma^4}, \qquad \frac{\partial g_{22}}{\partial r} = -2r, \]
\[ \frac{\partial g_{33}}{\partial r} = -2r \sin^2\theta, \qquad \frac{\partial g_{33}}{\partial \theta} = -2 r^2 \sin\theta \cos\theta. \]
Christoffel Symbols
The Christoffel symbols are defined as:
\[ \Gamma^\rho_{\mu\nu} = \frac{1}{2} g^{\rho\alpha} \left( \frac{\partial g_{\nu\alpha}}{\partial x^\mu} + \frac{\partial g_{\mu\alpha}}{\partial x^\nu} - \frac{\partial g_{\mu\nu}}{\partial x^\alpha} \right) \]
Some relevant non‑zero symbols are:
\[ \Gamma^{0}_{10} = \Gamma^{0}_{01} = \frac{1}{2} g^{00} \left(\frac{\partial g_{00}}{\partial r}\right) = \frac{R_s}{2 r^2 \sigma^2}, \]
\[ \Gamma^{1}_{00} = \frac{1}{2} g^{11} \left(-\frac{\partial g_{00}}{\partial r}\right) = \frac{R_s}{2 r^2}\sigma^2, \qquad \Gamma^{1}_{11} = \frac{1}{2} g^{11} \left(\frac{\partial g_{11}}{\partial r}\right) = -\frac{R_s}{2 r^2 \sigma^2}, \]
\[ \Gamma^{1}_{22} =\frac{1}{2} g^{11} \left(\frac{-\partial g_{22}}{\partial r}\right) = -r \sigma^2, \qquad \Gamma^{1}_{33} =\frac{1}{2} g^{11} \left(-\frac{\partial g_{33}}{\partial r}\right) = -r \sigma^2 \sin^2\theta, \]
\[ \Gamma^{2}_{12} = \Gamma^{2}_{21} =\frac{1}{2} g^{22} \left(\frac{\partial g_{22}}{\partial r}\right) = \frac{1}{r}, \qquad \Gamma^{2}_{33} =\frac{1}{2} g^{22} \left(-\frac{\partial g_{33}}{\partial r}\right) = -\sin\theta\cos\theta, \]
\[ \Gamma^{3}_{13} = \Gamma^{3}_{31} =\frac{1}{2} g^{33} \left(\frac{\partial g_{33}}{\partial r}\right) = \frac{1}{r}, \qquad \Gamma^{3}_{23} = \Gamma^{3}_{32} =\frac{1}{2} g^{33} \left(\frac{\partial g_{33}}{\partial r}\right) = \cot\theta. \]
All remaining Christoffel symbols are zero.
Geodesic Equations
We consider a geodesic worldline, which describes the natural trajectory of a particle in the absence of non‑gravitational forces. The general geodesic equation is:
\[ \frac{d^2 x^\alpha}{d\lambda^2} + \Gamma^\alpha_{\mu\nu} \frac{dx^\mu}{d\lambda} \frac{dx^\nu}{d\lambda} = 0 \]
Geodesic Equations per Coordinate
We work out the four coordinates, where \( \lambda \) is the affine parameter (but here may be taken equal to the proper time \( \tau \)):
For \( t \):
\[ \frac{d^2 t}{d\lambda^2} + \Gamma^{t}_{\mu\nu} \frac{dx^\mu}{d\lambda} \frac{dx^\nu}{d\lambda} = \frac{d^2 t}{d\lambda^2} + 2\,\Gamma^{0}_{10} \frac{dt}{d\lambda} \frac{dr}{d\lambda} = \frac{d^2 t}{d\lambda^2} + 2\,\frac{R_s}{2 r^2 \sigma^2} \frac{dt}{d\lambda} \frac{dr}{d\lambda} = 0 \]
For \( r \):
\[ \frac{d^2 r}{d\lambda^2} + \Gamma^{1}_{00}\left(\frac{dt}{d\lambda}\right)^2 + \Gamma^{1}_{11}\left(\frac{dr}{d\lambda}\right)^2 + \Gamma^{1}_{22}\left(\frac{d\theta}{d\lambda}\right)^2 + \Gamma^{1}_{33}\left(\frac{d\phi}{d\lambda}\right)^2 \]
\[ =\frac{d^2 r}{d\lambda^2} + \sigma^2 \frac{R_s}{2 r^2} \left(\frac{dt}{d\lambda}\right)^2 - \frac{R_s}{2 r^2 \sigma^2} \left(\frac{dr}{d\lambda}\right)^2 - r\sigma^2 \left(\frac{d\theta}{d\lambda}\right)^2 - r\sigma^2 \sin^2\theta \left(\frac{d\phi}{d\lambda}\right)^2 = 0 \]
For \( \theta \):
\[ \frac{d^2\theta}{d\lambda^2} + 2\,\Gamma^{2}_{12} \frac{dr}{d\lambda} \frac{d\theta}{d\lambda} + \Gamma^{2}_{33} \left(\frac{d\phi}{d\lambda}\right)^2 \]
\[ =\frac{d^2\theta}{d\lambda^2} + \frac{1}{r} \frac{dr}{d\lambda} \frac{d\theta}{d\lambda} - \cos\theta\sin\theta \left(\frac{d\phi}{d\lambda}\right)^2 = 0 \]
For \( \phi \):
\[ \frac{d^2\phi}{d\lambda^2} + 2\,\Gamma^{3}_{13} \frac{dr}{d\lambda} \frac{d\phi}{d\lambda} + 2\,\Gamma^{3}_{23} \frac{d\theta}{d\lambda} \frac{d\phi}{d\lambda} \]
\[ =\frac{d^2\phi}{d\lambda^2} + \frac{1}{r} \frac{dr}{d\lambda} \frac{d\phi}{d\lambda} + 2\cos\theta\sin\theta \frac{d\theta}{d\lambda} \frac{d\phi}{d\lambda} = 0 \]
Summarizing, these four component equations yield:
\[ \frac{d^2 t}{d\lambda^2} + 2\frac{R_s}{2 r^2 \sigma^2} \frac{dt}{d\lambda} \frac{dr}{d\lambda} = 0 \tag{1} \]
\[ \frac{d^2 r}{d\lambda^2} + \sigma^2 \frac{R_s}{2 r^2} \left(\frac{dt}{d\lambda}\right)^2 - \frac{R_s}{2 r^2 \sigma^2} \left(\frac{dr}{d\lambda}\right)^2 - r\sigma^2 \left(\frac{d\theta}{d\lambda}\right)^2 - r\sigma^2 \sin^2\theta \left(\frac{d\phi}{d\lambda}\right)^2 = 0 \tag{2} \]
\[ \frac{d^2\theta}{d\lambda^2} + \frac{1}{r} \frac{dr}{d\lambda} \frac{d\theta}{d\lambda} - \cos\theta\sin\theta \left(\frac{d\phi}{d\lambda}\right)^2 = 0 \tag{3} \]
\[ \frac{d^2\phi}{d\lambda^2} + \frac{1}{r} \frac{dr}{d\lambda} \frac{d\phi}{d\lambda} + 2\cos\theta\sin\theta \frac{d\theta}{d\lambda} \frac{d\phi}{d\lambda} = 0 \tag{4} \]
Elegant Approach According to Asaf Pe’er
We first follow the elegant approach of Asaf Pe’er from his article “Schwarzschild Solution and Black Holes” (Pe’er, 2014), and then present a simpler derivation.
According to Asaf Pe’er:
“At first sight, there seems to be little hope of solving this set of four coupled equations in a simple way. Fortunately, our task is greatly simplified by the high degree of symmetry of the Schwarzschild metric.”
Schwarzschild spacetime has four Killing fields: three due to spherical symmetry, and one due to time translation. Each Killing field leads, via Noether’s theorem, to a constant of motion for a freely falling particle.
If \( K_\mu \) is a Killing field, then:
\[ K_\mu \frac{dx^\mu}{d\lambda} = \text{constant} \tag{5} \]
There is also another constant of motion that follows from metric compatibility. Along a geodesic worldline:
\[ ds^2 = g_{\mu\nu} dx^\mu dx^\nu, \qquad \left(\frac{ds}{d\lambda}\right)^2 = c^2 \left(\frac{d\tau}{d\lambda}\right)^2 = c^2 \varepsilon = g_{\mu\nu} \frac{dx^\mu}{d\lambda} \frac{dx^\nu}{d\lambda} \tag{6} \]
Here:
- \( \varepsilon = 1 \) for massive particles,
- \( \varepsilon = 0 \) for photons (massless),
- \( \varepsilon = -1 \) for spacelike geodesics.
Use of Symmetries and Conservation Laws
Instead of solving the four coupled geodesic equations directly, we use the symmetries that lead to conservation laws via Killing fields.
In flat spacetime, symmetries (via Noether) lead to familiar conserved quantities:
- Time‑translation invariance → conservation of energy,
- Rotational invariance → conservation of angular momentum.
For the Schwarzschild metric, the same applies:
- Motion in a plane: Angular momentum keeps its direction → the particle moves in a plane. By rotating coordinates, we may choose this as the equatorial plane: \[ \theta = \frac{\pi}{2} \tag{7} \]
- Conservation of energy: The timelike Killing field is: \[ K^\mu = (1,0,0,0)_T \] The associated covariant component is: \[ K_\mu = g_{\mu\nu} K^\nu = \left(1 - \frac{2GM}{c^2 r},\, 0,\, 0,\, 0\right) \tag{8} \] From which: \[ K_\mu \frac{dx^\mu}{d\lambda} = \left(1 - \frac{2GM}{c^2 r}\right)\frac{dt}{d\lambda} = \frac{E}{c^2} \tag{9} \] or defined as: \[ k = \left(1 - \frac{2GM}{c^2 r}\right)\frac{dt}{d\lambda} = \frac{E}{c^2} \tag{9a} \]
- Conservation of angular momentum: The Killing vector for rotations in \( \phi \) is: \[ L^\mu = (0,0,0,-1)_T \] The covariant component is: \[ L_\mu = g_{\mu\nu} L^\nu = (0,0,0,-r^2 \sin^2\theta) \tag{10} \] At \( \theta = \pi/2 \), \( \sin\theta = 1 \), so: \[ r^2 \frac{d\phi}{d\lambda} = L \tag{11} \]
Thus the conserved quantities are:
- \( E \): energy per unit mass,
- \( L \): angular momentum per unit mass.
For photons, these are the actual energy and angular momentum. (For more on angular momentum, see Appendix 10.)
Note that equation (11) is the general‑relativistic analogue of Kepler’s second law: equal areas are swept out in equal times.
Alternative Derivation
Although Asaf Pe’er notes that solving the full set of coupled geodesic equations appears difficult, several of these equations turn out to be relatively straightforward to solve. We demonstrate this using equations (3.2.1) and (3.2.4).
Step 1 — Using Equation (3.2.1)
\[ \frac{d^2 t}{d\lambda^2} + 2\,\frac{R_s}{2 r^2 \sigma^2} \frac{dt}{d\lambda} \frac{dr}{d\lambda} = 0 \tag{3.2.1} \]
where: \[ \sigma^2 = 1 - \frac{2GM}{c^2 r} = 1 - \frac{R_s}{r}. \]
We multiply both sides by \( \sigma^2 \):
\[ \sigma^2 \frac{d^2 t}{d\lambda^2} + \frac{R_s}{r^2} \frac{dt}{d\lambda} \frac{dr}{d\lambda} = 0. \]
Since \( \sigma^2 = 1 - \frac{R_s}{r} \), we rewrite this as:
\[ \left(1 - \frac{R_s}{r}\right)\frac{d^2 t}{d\lambda^2} + \frac{R_s}{r^2} \frac{dt}{d\lambda} \frac{dr}{d\lambda} = 0. \]
We rewrite this:
\[ \frac{d^2 t}{d\lambda^2} + \frac{R_s}{r^2} \frac{dt}{d\lambda} \frac{dr}{d\lambda} - \frac{R_s}{r} \frac{d^2 t}{d\lambda^2} = 0 \]
Or:
\[ \frac{d}{d\lambda} \left( \frac{dt}{d\lambda} - \frac{R_s}{r}\frac{dt}{d\lambda} \right) = 0 \]
Thus: \[ \frac{d}{d\lambda} \left[ \frac{dt}{d\lambda}\left(1 - \frac{R_s}{r}\right) \right] = 0 \]
This shows that the expression \[ \frac{dt}{d\lambda}\left(1 - \frac{R_s}{r}\right) \] is constant along the worldline.
We recognize this as the conserved quantity related to the total energy per unit mass of the particle. Multiplying by \( c \) gives:
\[ \frac{c\,dt}{d\lambda}\left(1 - \frac{R_s}{r}\right) = \text{constant} = \frac{E}{c}\, (\text{total energy}) \tag{9} \]
Step 2 — Using equation (3.2.4)
We now continue with equation (3.2.4). To simplify the derivation, we assume that the particle moves in the equatorial plane, so that: \[ \theta = \frac{\pi}{2}. \]
Then equation (3.2.4) becomes:
\[ \frac{d^2 \Phi}{d\lambda^2} + \frac{2}{r} \frac{dr}{d\lambda} \frac{d\Phi}{d\lambda} + 2\frac{\cos\theta}{\sin\theta}\, \frac{d\theta}{d\lambda} \frac{d\Phi}{d\lambda} = 0. \]
Because in the equatorial plane: \[ \theta = \frac{\pi}{2} \quad\Rightarrow\quad \cos\theta = 0,\;\; \sin\theta = 1, \] the last term vanishes and we obtain:
\[ \frac{d^2 \Phi}{d\lambda^2} + \frac{2}{r} \frac{dr}{d\lambda} \frac{d\Phi}{d\lambda} = 0. \]
This leads to:
\[ \frac{1}{r^2}\frac{d}{d\lambda}\left(r^2 \frac{d\phi}{d\lambda}\right)=0 \]
Which means that:
\[ r^2\frac{d\phi}{d\lambda} \]is also constant along the geodesic worldline. We recognize this constant as the angular momentum per unit mass:
\[ r^2\frac{d\phi}{d\lambda}= \text{constant} = L \;(\text{angular momentum}) \tag{11} \]Summary of the conserved quantities
Due to the symmetries, there are two conserved quantities:
-
Energy per unit mass:
\[ \left(1 - \frac{R_s}{r}\right)\frac{dt}{d\lambda} = \frac{E}{c^2} \] -
Angular momentum per unit mass:
\[ L = r^2\,\frac{d\Phi}{d\lambda} \]
4.2.1 The Gravitational Potential
With the previously derived conservation laws, we can now further analyze the motion of particles in the Schwarzschild metric. We begin by writing out equation (6), using the conserved quantities from equations (10) and (11):
\[ \left( 1 - \frac{2GM}{c^{2} r} \right) c^{2} \left( \frac{dt}{d\lambda} \right)^{2} - \left( 1 - \frac{2GM}{c^{2} r} \right)^{-1} \left( \frac{dr}{d\lambda} \right)^{2} - r^{2} \left( \frac{d\phi}{d\lambda} \right)^{2} = c^{2} \varepsilon \tag{12} \]Substituting the conserved quantities E and L gives:
\[ \left( 1 - \frac{2GM}{c^{2} r} \right) c^{2} \left( \frac{dt}{d\lambda} \right)^{2} - \left( 1 - \frac{2GM}{c^{2} r} \right)^{-1} \left( \frac{dr}{d\lambda} \right)^{2} - \frac{L^{2}}{r^{2}} = c^{2} \varepsilon \]We multiply this equation by \( 1 - \frac{2GM}{c^{2} r} \) and use \( \frac{E}{c} = c \frac{dt}{d\lambda}\left( 1 - \frac{2GM}{c^{2} r} \right) \) and \( L = r^{2} \frac{d\phi}{d\lambda} \) to rewrite:
\[ \left( 1 - \frac{2GM}{c^{2} r} \right)^{2} c^{2} \left( \frac{dt}{d\lambda} \right)^{2} - \left( \frac{dr}{d\lambda} \right)^{2} - \left( 1 - \frac{2GM}{c^{2} r} \right) \frac{L^{2}}{r^{2}} + c^{2} \varepsilon = 0 \]Substituting the expression for E yields:
\[ \frac{E^{2}}{c^{2}} - \left( \frac{dr}{d\lambda} \right)^{2} - \left( 1 - \frac{2GM}{c^{2} r} \right) \frac{L^{2}}{r^{2}} + c^{2} \varepsilon = 0 \tag{13} \]We have thus reduced the four coupled geodesic equations to a single differential equation for \( r(\lambda) \). This is a major simplification.
We rewrite equation (13) in the form:
\[ \frac{1}{2} \left( \frac{dr}{d\lambda} \right)^{2} + V(r) = \frac{1}{2} \frac{E^{2}}{c^{2}} \tag{14} \]with the effective potential \( V(r) \) defined as:
\[ V(r) = \frac{1}{2} c^{2} \varepsilon - \frac{\varepsilon GM}{r} + \frac{L^{2}}{2 r^{2}} - \frac{GM L^{2}}{c^{2} r^{3}} \tag{15} \]Equation (14) is formally identical to the classical equation for the motion of a particle (of unit mass) in a one‑dimensional potential \( V(r) \), where the total “energy” is \( \frac{1}{2} \frac{E^{2}}{c^{2}} \). Of course, the true energy is \( E \), but this form makes the equation analogous to classical mechanics.
If we analyze the potential \( V(r) \) in equation (15), we see that it differs from the Newtonian potential in only one place: the last term. This term, proportional to \( 1/r^{3} \), represents a purely relativistic correction and becomes important especially at small \( r \).
The terms can be interpreted as follows:
- The first term is constant (rest energy for massive particles), depending on \( \varepsilon = 1 \) for massive particles and \( \varepsilon = 0 \) for photons.
- The second term is the Newtonian gravitational potential.
- The third term is the classical angular‑momentum potential.
- The fourth term is the relativistic correction.
Note: despite the formal similarity to classical mechanics, this does not describe the motion of a particle freely moving in one dimension. In reality, the particle follows an orbit around a massive object. The relevant quantities are not only \( r(\lambda) \), but also \( t(\lambda) \) and \( \phi(\lambda) \), which together describe the full spacetime trajectory.
4.2.2 Intermezzo on Energy in Schwarzschild Geometry
In this intermezzo we analyze the form of the energy as derived in equation (3.2.9) of section 4.2. This energy is a conserved quantity in Schwarzschild geometry.
We begin with the relation:
\[ \left( 1 - \frac{2GM}{c^{2} r} \right) \frac{dt}{d\lambda} = \frac{E}{m c^{2}} = \sigma^{2} \frac{dt}{d\lambda} \tag{9} \]From which follows:
\[ E = \sigma^{2} m c^{2} \frac{dt}{d\lambda} \]The Schwarzschild metric is:
\[ ds^{2} = c^{2} d\tau^{2} = \sigma^{2} c^{2} dt^{2} - \frac{dr^{2}}{\sigma^{2}} - r^{2} d\theta^{2} - r^{2} \sin^{2}\theta \, d\phi^{2} \]We use an affine parameter \( \lambda \) with \( d\tau = d\lambda \) and restrict ourselves to the equatorial plane \( \theta = \frac{\pi}{2} \).
\[ \sigma^{2} c^{2} \left( \frac{dt}{d\lambda} \right)^{2} - \sigma^{-2} \left( \frac{dr}{d\lambda} \right)^{2} - r^{2} \left( \frac{d\phi}{d\lambda} \right)^{2} = c^{2} \varepsilon \]Rewriting in terms of velocities with respect to coordinate time \( t \), we obtain:
\[ \sigma^{2} c^{2} \left(\frac{dt}{d\lambda}\right)^{2} \;-\; \sigma^{-2} \left(\frac{dr}{dt}\right)^{2} \left(\frac{dt}{d\lambda}\right)^{2} \;-\; r^{2} \left(\frac{d\Phi}{dt}\right)^{2} \left(\frac{dt}{d\lambda}\right)^{2} = c^{2}\,\varepsilon \]
For massive particles \( \varepsilon = 1 \):
\[ \sigma^{2} \left( \frac{dt}{d\lambda} \right)^{2} \left( 1 - \frac{\sigma^{-2} \left( \frac{dr}{dt} \right)^{2} + r^{2} \left( \frac{d\phi}{dt} \right)^{2}}{\sigma^{2} c^{2}} \right) = 1 \tag{9a} \] \[ \left( \frac{dt}{d\lambda} \right)^{2}\left( 1 - \frac{v^2}{\sigma^2 c^2}\right) =\frac{1}{\sigma^2} \]from which follows:
\[ \frac{dt}{d\lambda} = \frac{1}{\sigma} \frac{1}{\sqrt{1 - \frac{v^{2}}{\sigma^{2} c^{2}}}} \]Where \( v^{2} = \sigma^{-2} \left( \frac{dr}{dt} \right)^{2} + r^{2} \left( \frac{d\phi}{dt} \right)^{2} \) is the total velocity. Combined with the energy (equation 9), this yields:
\[ E = \sigma^{2} m c^{2} \frac{dt}{d\lambda} = \frac{\sigma m c^{2}} {\sqrt{1 - \frac{v^{2}}{\sigma^{2} c^{2}}}} = \gamma_\sigma \sigma m c^{2} \]This conserved energy consists of:
- Rest energy: \( E_{0} = \sigma m c^{2} \)
- Relativistic kinetic energy: \[ E_{\text{kin}} = \sigma m c^{2} \left( \frac{1}{\sqrt{1 - \frac{v^{2}}{\sigma^{2} c^{2}}}} - 1 \right) \]
In the non‑relativistic limit \( v \ll c \), and using a first‑order Taylor expansion of the square root, we find the “kinetic” energy:
\[ E_{\text{kin}} \approx \sigma m c^{2} \left( 1+\frac{v^{2}}{2\sigma^{2}c^2}-1 \right)= \frac{m v^{2}}{2 \sigma} \]4.2.2.1 Alternative Approach via the Metric
Begin with the Schwarzschild equation:
\[ ds^2 = c^2 d\tau^2 = \sigma^2 c^2 dt^2 - \sigma^{-2} dr^2 - r^2 d\theta^2 - r^2 \sin^2\theta\, d\phi^2 \]
For the equatorial plane \(\theta = \pi/2\) and with an affine parameter \(\lambda\), we have:
\[ \sigma^2 c^2 \left(\frac{dt}{d\lambda}\right)^2 - \sigma^{-2} \left(\frac{dr}{d\lambda}\right)^2 - r^2 \left(\frac{d\phi}{d\lambda}\right)^2 = c^2 \varepsilon \]
Multiply by \(\sigma^2\):
\[ \sigma^4 c^2 \left(\frac{dt}{d\lambda}\right)^2 - \left(\frac{dr}{d\lambda}\right)^2 - \sigma^2 r^2 \left(\frac{d\phi}{d\lambda}\right)^2 = \sigma^2 c^2 \varepsilon \]
Use again:
\[ E = \sigma^2 m c^2 \frac{dt}{d\lambda} \quad \Rightarrow \quad \frac{E}{m c} = \sigma^2 c \frac{dt}{d\lambda} \]
Then it follows:
\[ \left(\frac{E}{m c}\right)^2 = \left(\frac{dr}{d\lambda}\right)^2 + \sigma^2 r^2 \left(\frac{d\phi}{d\lambda}\right)^2 + \sigma^2 c^2 \varepsilon \]
Define:
\[ r^2 \frac{d\phi}{d\lambda} = \frac{L}{m} \quad \Rightarrow \quad r^2 \left(\frac{d\phi}{d\lambda}\right)^2 = \frac{L^2}{r^2 m^2} = \frac{(m v_t r)^2}{r^2 m^2} = v_t^2 \]
Now take \(\lambda = \tau\) and \(\varepsilon = 1\):
\[ \left(\frac{E}{m c}\right)^2 = \left(\frac{dr}{d\tau}\right)^2 + \sigma^2 v_t^2 + \sigma^2 c^2 = v_r^2 + \sigma^2 v_t^2 + \sigma^2 c^2 \]
\[ \frac{E^2}{c^2} = m^2 v_r^2 + m^2 \sigma^2 v_t^2 + m^2 \sigma^2 c^2 \]
where:
- \(v_r = \dfrac{dr}{d\tau}\) is the radial velocity,
- \(v_t = r \dfrac{d\phi}{d\tau}\) is the transverse velocity.
The terms are interpreted as:
- \(m v_r\): radial momentum
- \(m \sigma v_t\): transverse momentum
- \(\sigma m c^2\): rest energy
The kinetic energy becomes:
\[ E_{\text{kin}} = m c\sqrt{v_r^2 + \sigma^2 v_t^2} \]
4.2.2.2 Third Approach: via a Relativistic Energy–Momentum Relation
Start again with the norm of the 4‑velocity:
\[ \sigma^2 c^2 \left(\frac{dt}{d\lambda}\right)^2 - \sigma^{-2} \left(\frac{dr}{d\lambda}\right)^2 - r^2 \left(\frac{d\phi}{d\lambda}\right)^2 = c^2 \varepsilon \]
This leads to:
\[ \left(\frac{E}{\sigma c}\right)^2 - \sigma^{-2} \left(\frac{dr}{d\lambda}\right)^2 - r^2 \left(\frac{d\phi}{d\lambda}\right)^2 = c^2 \varepsilon \]
\[ \frac{E^2}{\sigma^2 c^2} - p^2 = c^2 \varepsilon \quad \Rightarrow \quad E^2 = \sigma^2 c^4 \varepsilon + \sigma^2 c^2 p^2 \]
Here \(p\) is the total spatial momentum per unit mass. In rest, \(E=\sigma m c^2\), and for a photon \(E=\sigma p c\). In general:
\[ E^2 = \sigma^2 m^2 c^4 \varepsilon + \sigma^2 m^2 c^2 U^2 \]
where:
\[ U^2 =\left(\frac{dx^\mu}{d\tau}\right)^2 = \sigma^{-2} \left(\frac{dr}{d\tau}\right)^2 + r^2 \left(\frac{d\phi}{d\tau}\right)^2 \]
is the squared norm of the spatial velocity. For massive particles (\(\varepsilon=1\)) and unit mass this becomes:
\[ E^2 = \sigma^2 c^4 + \sigma^2 c^2 U^2 \]
4.2.3 Summary
- The Schwarzschild metric and its associated geodesic equations form the foundation of many relativistic experiments.
- Symmetries and conserved quantities reduce the equations of motion to manageable forms.
- The effective potential incorporates both classical and relativistic effects such as light deflection, perihelion precession, and Shapiro delay.
4.3 Experiment 3 – Deflection of Light
4.3.1 Historical and Theoretical Background
The deflection of light by gravity was the first experimental test of general relativity. In classical Newtonian gravity, light—being massless—moves in straight lines unaffected by gravity. According to general relativity, however, light follows the curvature of spacetime caused by mass.
Thus a light ray deviates from a straight line when passing near a massive object such as the Sun. This effect can be observed when viewing the light of a star that appears visually close to the Sun.
When the star’s light grazes the Sun, it is bent, so the star appears at a different position in the sky than its true location. Half a year later, when the star is on the opposite side of the sky, its light passes far from the Sun and its position is observed correctly.
To observe this effect, a solar eclipse is required, because otherwise sunlight overwhelms the starlight. In 1919, this effect was first measured by Arthur Eddington during a total solar eclipse. His observations confirmed Einstein’s prediction and marked a major breakthrough in the acceptance of general relativity.
4.3.2 Derivation of the Deflection Angle
We consider a light ray (photon) approaching from infinity and passing near the Sun. The motion of the photon in Schwarzschild spacetime is described by the effective energy equation derived in Section 4.2.1.
For a photon, \(\varepsilon = 0\), so:
\[ \frac{1}{2}\left(\frac{dr}{d\lambda}\right)^2 + V(r) = \frac{1}{2}\frac{E^2}{c^2} \tag{14} \]
with:
\[ V(r) = \frac{1}{2}c^2\varepsilon - \varepsilon \frac{GM}{r} + \frac{L^2}{2r^2} - \frac{GM L^2}{c^2 r^3} \tag{15} \]
where \(L\) is the angular momentum and \(E\) the energy of the photon.
For \(\varepsilon = 0\):
\[ \frac{1}{2}\left(\frac{dr}{d\lambda}\right)^2 + \frac{L^2}{2r^2} - \frac{GM L^2}{c^2 r^3} = \frac{1}{2}\frac{E^2}{c^2} \]
Divide by \(L^2\) and multiply by 2:
\[ \frac{1}{L^2}\left(\frac{dr}{d\lambda}\right)^2 + \frac{1}{r^2} - \frac{2GM}{c^2 r^3} = \frac{E^2}{c^2 L^2} \]
Or equivalently:
\[ \frac{1}{L^2}\left(\frac{dr}{d\lambda}\right)^2 + \frac{1}{r^2} \left(1 - \frac{2GM}{c^2 r}\right) = \frac{E^2}{c^2 L^2} \]
Isolating \((dr/d\lambda)^2\) gives:
\[ \left(\frac{dr}{d\lambda}\right)^2 = L^2 \left( \frac{E^2}{c^2 L^2} - \frac{1}{r^2} \left(1 - \frac{2GM}{c^2 r}\right) \right) \tag{16} \]
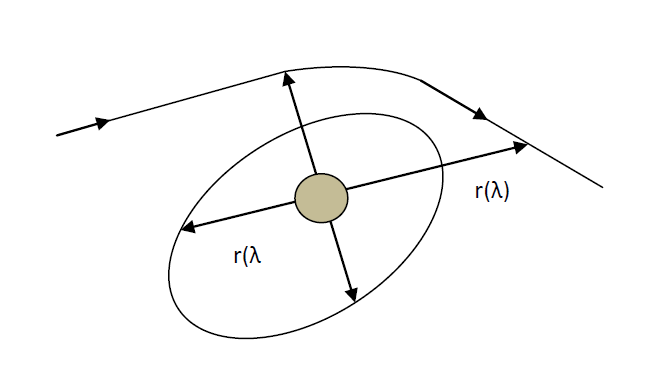
4.3.3 Impact Parameter and Angular Momentum
The impact parameter \(b\) is the distance between the centerline of the massive object (the Sun) and the asymptotic direction of the light ray at infinity.
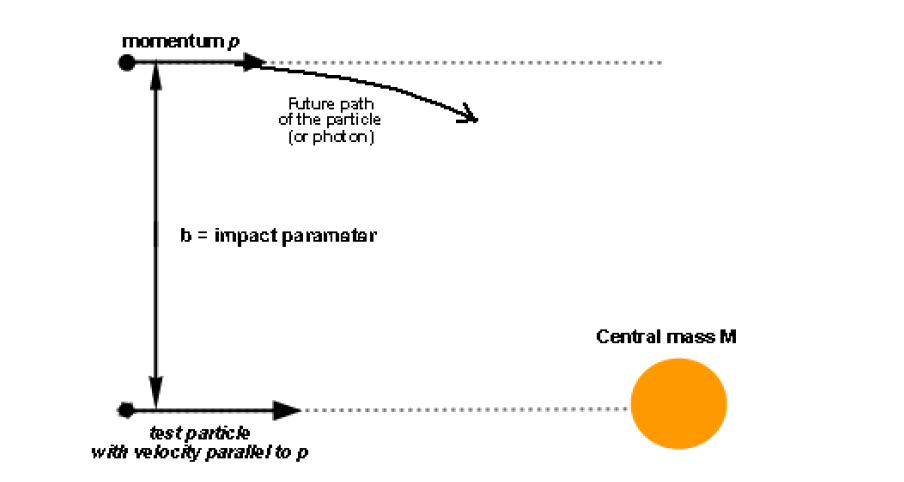
The angular momentum of the photon is:
\[ L = p\,b \tag{17} \]
For a photon, \(E = pc\), so:
\[ b = \frac{L}{E/c} \tag{18} \]
Additional clarification of (17) and (18):
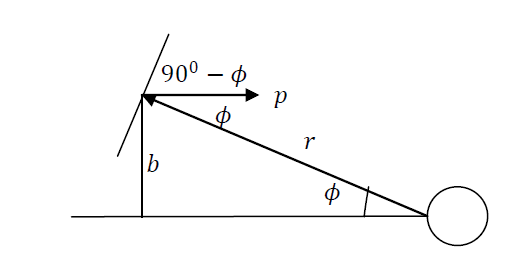
The angular momentum is \(L = p \sin\phi \cdot r = p r \sin\phi\).
The energy in general is \(E^2 = p^2 c^2 + m^2 c^4\); for a photon \(m=0\), so \(E = pc\). Thus:
\[ \frac{L}{E/c}=\frac{pb}{pc/c}=b \]
Hence:
\[ \frac{1}{b^2} = \frac{E^2}{c^2 L^2} \tag{18a} \]
4.3.4 Deriving the Path: The Photon Orbit Equation
From the conserved quantity:
\[ r^2 \frac{d\phi}{d\lambda} = L \]
Thus:
\[ \frac{d\phi}{d\lambda} = \frac{d\phi}{dr}\frac{dr}{d\lambda} = \frac{L}{r^2} \quad \Rightarrow \quad \frac{d\phi}{dr} = \frac{L}{r^2} \left(\frac{dr}{d\lambda}\right)^{-1} \]
Combined with (16):
\[ \frac{d\phi}{dr} = \pm \frac{L}{r^2} \frac{1}{L} \left[ \frac{E^2}{c^2L^2} - \frac{1}{r^2} \left(1 - \frac{2GM}{c^2r}\right) \right]^{-1/2} \]
Using (18a):
\[ \frac{d\phi}{dr} = \pm \frac{1}{r^2} \left( \frac{1}{b^2} - \frac{1}{r^2} \left(1 - \frac{2GM}{c^2 r}\right) \right)^{-1/2} \tag{19} \]
This leads to:
\[ \left(\frac{1}{r^2}\frac{dr}{d\phi}\right)^2 = \frac{1}{b^2} - \frac{1}{r^2} \left(1 - \frac{2GM}{c^2 r}\right) \tag{20} \]
4.3.5 Integrating the Path
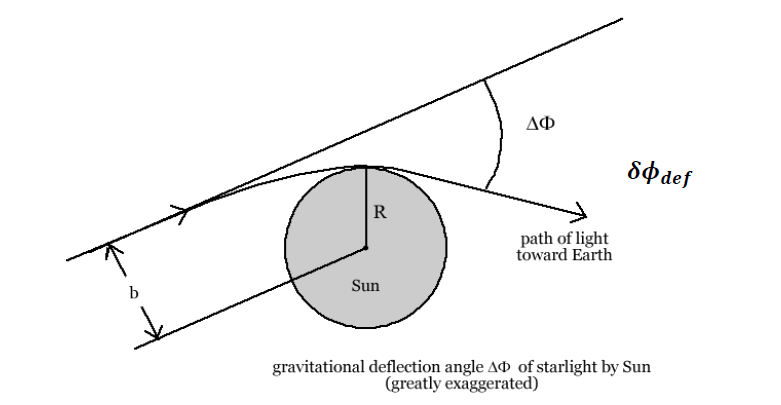
The deflection angle is obtained by computing the angular change \(\Delta \phi\) along the photon’s trajectory, from infinity to the perihelion \(r = R\), and back. From (19) we obtain (see Figure 3):
\[ \Delta \phi = 2 \int_{r_1}^{\infty} \frac{dr}{r^2 \sqrt{ \frac{1}{b^2} - \frac{1}{r^2} \left( 1 - \frac{2GM}{c^2 r} \right) }} \tag{21} \]
At the turning point \(r = R\) we have \[ \frac{dr}{d\phi} = 0 \] so that from equation (20) it follows:
\[ \frac{1}{b^2} = \frac{1}{R^2} \left( 1 - \frac{2GM}{c^2 R} \right) \tag{22} \]Substitute this into equation (20):
\[ \left( \frac{1}{r^2} \frac{dr}{d\phi} \right)^2 = \frac{1}{R^2} \left( 1 - \frac{2GM}{c^2 R} \right) - \frac{1}{r^2} \left( 1 - \frac{2GM}{c^2 r} \right) \tag{23} \]4.3.6 Variable substitution
Perform the following substitution:
\[ u = \frac{R}{r} \]Then:
\[ \frac{du}{d\phi} = \frac{du}{dr} \frac{dr}{d\phi} = - \frac{R}{r^2} \frac{dr}{d\phi} \] \[ \left( \frac{du}{d\phi} \right)^2 = \frac{R^2}{r^4} \left( \frac{dr}{d\phi} \right)^2 \]Here \(u\) varies between \(1\) (at \(r = R\)) and \(0\) (at \(r = \infty\)). Equation (23) then becomes:
\[ \left( \frac{du}{d\phi} \right)^2 = \left( 1 - \frac{2GM}{c^2 R} \right) - u^2 \left( 1 - \frac{2GM}{c^2 R} u \right) \]Or:
\[ \left( \frac{du}{d\phi} \right)^2 = 1 - u^2 - \frac{2GM}{c^2 R} \left( 1 - u^3 \right) \tag{24} \]From this it follows:
\[ d\phi = \left[ 1 - u^2 - \frac{2GM}{c^2 R} \left( 1 - u^3 \right) \right]^{-1/2} du \] \[ =\frac{\left(1-u^2\right)^{-1/2}}{\left[1-\frac{2GM}{c^2R}\left(1-u^3\right) \left(1-u^2\right)^{-1}\right]^{1/2}}\,du \tag{25} \]This integral is difficult to solve in closed form. To simplify it, we use the substitution:
\[ u = \cos \alpha, \qquad 0 < \alpha < \frac{\pi}{2} \quad thus \quad 0 < u < 1 \]Then:
\[ d\phi = - \left[ 1 - \frac{2GM}{c^2 R} \frac{1 - \cos^3 \alpha}{\sin^2 \alpha} \right]^{-1/2} d\alpha \tag{26} \]By noting that:
\[ \frac{1 - \cos^3 \alpha}{\sin^2 \alpha} = \frac{(1 - \cos \alpha)(1 + \cos \alpha + \cos^2 \alpha)} {(1 - \cos \alpha)(1 + \cos \alpha)} = \frac{1 + \cos \alpha + \cos^2 \alpha}{1 + \cos \alpha} \] \[ =\frac{1 + \cos \alpha \left(1 + \cos \alpha\right)}{1 + \cos \alpha} =\cos \alpha+\frac{1}{1 + \cos \alpha} \]we finally obtain:
\[ d\phi = - \left[ 1 - \frac{2GM}{c^2 R}\left(\cos\alpha+\frac{1}{1+\cos\alpha}\right) \right]^{-1/2} d\alpha \tag{27} \]With:
\[ \cos \alpha = \frac{R}{r} \]Up to this point no approximation has been applied. This full derivation is suitable for computing the light deflection exactly, although in practice a first‑order approximation is usually sufficient to determine the deflection angle at the solar limb.
4.3.6.1 Approximations and integration
The parameter \[ \frac{2GM}{c^2 R} \approx 4.24 \times 10^{-6} \] is very small at the surface of the Sun.
We apply the Taylor approximation:
\[ \frac{1}{\sqrt{1 - k}} \approx 1 + \frac{1}{2} k \]Applied to equation (27) this yields:
\[ d\phi = - \left[ 1 - \frac{2GM}{c^2 R}\left(\cos\alpha+\frac{1}{1+\cos\alpha}\right) \right]^{-1/2} d\alpha \]Or:
\[ d\phi = -\frac{1}{\sqrt{\left[ 1 - \frac{2GM}{c^2 R}\left(\cos\alpha+\frac{1}{1+\cos\alpha}\right) \right]}}d\alpha \]After approximation:
\[ d\phi \approx - \left[ 1 + \frac{GM}{c^2 R} \left(\cos \alpha+\frac{1}{1 + \cos \alpha}\right) \right] d\alpha \tag{28} \]We can now compute the total change in azimuth along the entire photon trajectory, from \(\alpha=0\) to \(\alpha=\frac{\pi}{2}\), and then double it:
The total angular change becomes:
\[ \Delta \phi = 2 \int_{0}^{\pi/2} \left[ 1 + \frac{GM}{c^2 R} \left(\cos \alpha+\frac{1}{1 + \cos \alpha}\right) \right] d\alpha \tag{29} \]To evaluate this integral, we examine the second term separately. We consider the integral:
\[ \int \frac{1}{1+\cos\alpha}\, d\alpha \]We use the trigonometric identity:
\[ 1+\cos\alpha = 2\cos^2\frac{\alpha}{2}. \] Thus: \[ \frac{1}{1+\cos\alpha} = \frac{1}{2\cos^2\frac{\alpha}{2}}. \]Note that:
\[ \frac{1}{2\cos^2\frac{\alpha}{2}} = \frac{d}{d\alpha}\left(\tan\frac{\alpha}{2}\right). \] Thus: \[ \int \frac{1}{1+\cos\alpha}\, d\alpha = \tan\frac{\alpha}{2}. \]Now we can evaluate the full integral (29):
\[ \Delta \phi = 2 \left[ \alpha + \frac{GM}{c^2 R} \left( \sin \alpha + \tan \frac{\alpha}{2} \right) \right]_{0}^{\pi/2} \tag{30} \]We substitute:
\[ \begin{aligned} \alpha = \frac{\pi}{2}: &\qquad \sin\frac{\pi}{2} = 1,\qquad \tan\frac{\pi}{4} = 1,\\[6pt] \alpha = 0: &\qquad \sin 0 = 0,\qquad \tan 0 = 0. \end{aligned} \] Thus: \[ \Delta\phi = 2\left( \frac{\pi}{2} + \frac{GM}{c^{2}R}(1 + 1) \right) = \pi + \frac{4GM}{c^{2}R}. \] \[ \Delta \phi = \pi + \frac{4GM}{c^2 R} \tag{31} \]Note: the integral should run from \(r=\infty\) to \(R\), so \(u\) goes from 0 to 1, and thus \(\alpha\) from \(\frac{\pi}{2}\) to 0. By reversing the limits to \(0\) to \(\frac{\pi}{2}\), the sign changes and the minus sign disappears.
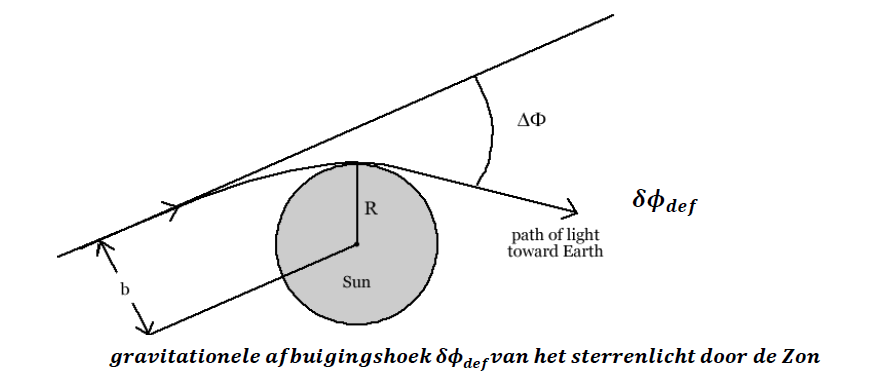
The first term, \(\pi\), is the total angular change of a photon in flat spacetime — a straight path without deflection. The second term is the extra deflection due to spacetime curvature. The actual deflection angle is therefore:
\[ \delta \phi_{\mathrm{def}} = \Delta \phi - \pi \approx \frac{4GM}{c^2 R} \tag{32} \]Numerical value
With:
\[ \begin{aligned} G &= 6.674 \cdot 10^{-11}\ \mathrm{N\,m^{2}/kg^{2}},\\ M_{s} &= 1.989 \cdot 10^{30}\ \mathrm{kg},\\ c &= 3.00 \cdot 10^{8}\ \mathrm{m/s},\\ R_{s} &= 6.963 \cdot 10^{8}\ \mathrm{m}, \end{aligned} \] we find: \[ \delta\phi_{\mathrm{def}} = \frac{4GM_{s}}{c^{2}R_{s}} \approx 8.5 \cdot 10^{-6}\ \text{radians}. \]To convert this to arcseconds we use:
\[ 1\ \text{rad} \approx 206.265''. \] Thus: \[ \delta\phi_{\mathrm{def}} \approx 8.5 \cdot 10^{-6} \times 206.265'' \approx 1.75''. \]4.3.7 Conclusion
This deflection of 1.75 arcseconds was first observed by Arthur Eddington during the 1919 solar eclipse. The result spectacularly confirmed Einstein’s prediction and marked a milestone in the experimental verification of general relativity.
This effect is also observed outside our solar system and is known as “gravitational lensing”.
4.3.8 Physical interpretation
- Light follows the curvature of spacetime.
- The deflection is a geometric effect, not a force.
- Observable during solar eclipses.
At the turning point \( r = R \) we have \[ \frac{dr}{d\phi} = 0 \] so that from equation (20) it follows:
\[ \frac{1}{b^2} = \frac{1}{R^2} \left( 1 - \frac{2GM}{c^2 R} \right) \tag{22} \]Insert this into equation (20):
\[ \left( \frac{1}{r^2} \frac{dr}{d\phi} \right)^2 = \frac{1}{R^2} \left( 1 - \frac{2GM}{c^2 R} \right) - \frac{1}{r^2} \left( 1 - \frac{2GM}{c^2 r} \right) \tag{23} \]4.3.6 Variable substitution
Perform the following substitution:
\[ u = \frac{R}{r} \]Then:
\[ \frac{du}{d\phi} = \frac{du}{dr} \frac{dr}{d\phi} = - \frac{R}{r^2} \frac{dr}{d\phi} \] \[ \left( \frac{du}{d\phi} \right)^2 = \frac{R^2}{r^4} \left( \frac{dr}{d\phi} \right)^2 \]Here \(u\) varies between \(1\) (at \(r = R\)) and \(0\) (at \(r = \infty\)). Equation (23) becomes:
\[ \left( \frac{du}{d\phi} \right)^2 = \left( 1 - \frac{2GM}{c^2 R} \right) - u^2 \left( 1 - \frac{2GM}{c^2 R} u \right) \]Or:
\[ \left( \frac{du}{d\phi} \right)^2 = 1 - u^2 - \frac{2GM}{c^2 R} \left( 1 - u^3 \right) \tag{24} \]From this it follows:
\[ d\phi = \left[ 1 - u^2 - \frac{2GM}{c^2 R} \left( 1 - u^3 \right) \right]^{-1/2} du \] \[ = \frac{(1-u^2)^{-1/2}} {\left[ 1 - \frac{2GM}{c^2 R}(1-u^3)(1-u^2)^{-1} \right]^{1/2}} \, du \tag{25} \]This integral is difficult to solve in closed form. To simplify it, we use the substitution:
\[ u = \cos \alpha, \qquad 0 < \alpha < \frac{\pi}{2} \quad\Rightarrow\quad 0 < u < 1 \]Then:
\[ d\phi = - \left[ 1 - \frac{2GM}{c^2 R} \frac{1 - \cos^3 \alpha}{\sin^2 \alpha} \right]^{-1/2} d\alpha \tag{26} \]By noting that:
\[ \frac{1 - \cos^3 \alpha}{\sin^2 \alpha} = \frac{(1 - \cos \alpha)(1 + \cos \alpha + \cos^2 \alpha)} {(1 - \cos \alpha)(1 + \cos \alpha)} = \frac{1 + \cos \alpha + \cos^2 \alpha}{1 + \cos \alpha} \] \[ = \cos \alpha + \frac{1}{1 + \cos \alpha} \]we finally obtain:
\[ d\phi = - \left[ 1 - \frac{2GM}{c^2 R} \left( \cos\alpha + \frac{1}{1+\cos\alpha} \right) \right]^{-1/2} d\alpha \tag{27} \]With:
\[ \cos \alpha = \frac{R}{r} \]Up to this point no approximation has been applied. This full derivation is suitable for computing the light deflection exactly, although in practice a first‑order approximation is usually sufficient to determine the deflection angle near the solar limb.
4.3.6.1 Approximations and integration
The parameter \[ \frac{2GM}{c^2 R} \approx 4.24 \times 10^{-6} \] is extremely small at the solar surface.
We apply the Taylor approximation:
\[ \frac{1}{\sqrt{1 - k}} \approx 1 + \frac{1}{2} k \]Applied to equation (27) this yields:
\[ d\phi = - \left[ 1 - \frac{2GM}{c^2 R} \left( \cos\alpha + \frac{1}{1+\cos\alpha} \right) \right]^{-1/2} d\alpha \]Or:
\[ d\phi = - \frac{1}{ \sqrt{ 1 - \frac{2GM}{c^2 R} \left( \cos\alpha + \frac{1}{1+\cos\alpha} \right) }} d\alpha \]After approximation:
\[ d\phi \approx - \left[ 1 + \frac{GM}{c^2 R} \left( \cos \alpha + \frac{1}{1 + \cos \alpha} \right) \right] d\alpha \tag{28} \]We can now compute the total azimuthal change along the full photon trajectory, from \(\alpha = 0\) to \(\alpha = \pi/2\), and double it:
The total angle change becomes:
\[ \Delta \phi = 2 \int_{0}^{\pi/2} \left[ 1 + \frac{GM}{c^2 R} \left( \cos \alpha + \frac{1}{1 + \cos \alpha} \right) \right] d\alpha \tag{29} \]To evaluate this integral, consider the second term separately:
\[ \int \frac{1}{1+\cos\alpha}\, d\alpha \]Using the trigonometric identity:
\[ 1+\cos\alpha = 2\cos^2\frac{\alpha}{2} \] \[ \frac{1}{1+\cos\alpha} = \frac{1}{2\cos^2(\alpha/2)} = \frac{d}{d\alpha}\left(\tan\frac{\alpha}{2}\right) \]Thus:
\[ \int \frac{1}{1+\cos\alpha}\, d\alpha = \tan\frac{\alpha}{2} \]Now we can evaluate the full integral (29):
\[ \Delta \phi = 2 \left[ \alpha + \frac{GM}{c^2 R} \left( \sin \alpha + \tan \frac{\alpha}{2} \right) \right]_{0}^{\pi/2} \tag{30} \]Substituting:
\[ \alpha = \frac{\pi}{2}: \quad \sin\frac{\pi}{2} = 1,\quad \tan\frac{\pi}{4} = 1, \] \[ \alpha = 0: \quad \sin 0 = 0,\quad \tan 0 = 0. \]Thus:
\[ \Delta\phi = 2\left( \frac{\pi}{2} + \frac{GM}{c^{2}R}(1 + 1) \right) = \pi + \frac{4GM}{c^{2}R}. \] \[ \Delta \phi = \pi + \frac{4GM}{c^2 R} \tag{31} \]Note: the integral should run from \(r=\infty\) to \(R\), so \(u\) goes from 0 to 1, and thus \(\alpha\) from \(\pi/2\) to 0. Reversing the limits removes the minus sign.
The first term, \(\pi\), is the total angular change of a photon in flat spacetime — a straight line with no deflection. The second term is the extra deflection due to spacetime curvature. Thus the physical deflection angle is:
\[ \delta \phi_{\mathrm{def}} = \Delta \phi - \pi \approx \frac{4GM}{c^2 R} \tag{32} \]Numerical value
With:
\[ \begin{aligned} G &= 6.674 \cdot 10^{-11}\ \mathrm{N\,m^{2}/kg^{2}},\\ M_{s} &= 1.989 \cdot 10^{30}\ \mathrm{kg},\\ c &= 3.00 \cdot 10^{8}\ \mathrm{m/s},\\ R_{s} &= 6.963 \cdot 10^{8}\ \mathrm{m}, \end{aligned} \]we find:
\[ \delta\phi_{\mathrm{def}} = \frac{4GM_{s}}{c^{2}R_{s}} \approx 8.5 \cdot 10^{-6}\ \text{radians}. \]Converting to arcseconds:
\[ 1\ \text{rad} \approx 206.265'' \] \[ \delta\phi_{\mathrm{def}} \approx 1.75''. \]4.3.7 Conclusion
This deflection of 1.75 arcseconds was first observed by Arthur Eddington during the 1919 solar eclipse. The result spectacularly confirmed Einstein’s prediction and marked a milestone in the experimental verification of general relativity.
This effect is also observed outside our solar system and is known as “gravitational lensing”.
4.3.8 Physical interpretation
- Light follows the curvature of spacetime.
- The deflection is a geometric effect, not a force.
- Observable during solar eclipses.
4.3.9 Key insights
- The deflection of light is a direct consequence of the curvature of space-time around mass.
- The Schwarzschild metric provides a quantitative prediction that has been confirmed experimentally.
- This experiment was crucial for the early acceptance of general relativity.
4.4 Experiment 4 – Precession of the Perihelia (Mercury)
Based on the article by Owen Biesel (Biesel, 2008).
4.4.1 Introduction
- Physical problem: The orbit of Mercury around the Sun is an ellipse, but the closest point (perihelion) slowly shifts over time. This phenomenon is called perihelion precession.
- Classical explanation: Newtonian mechanics explains most of this precession (due to the influence of other planets), but a residual of about 43 arcseconds per century remains unexplained.
- Relativistic explanation: General relativity predicts an additional precession caused by the curvature of spacetime around the Sun, exactly matching the observed excess.
4.4.2 Theoretical framework: Schwarzschild metric
In general relativity, we treat a planet such as Mercury as a test particle moving along a geodesic path through curved spacetime.
The Schwarzschild metric describes this spacetime around a spherically symmetric mass (such as the Sun):
\[ ds^{2} = c^{2} d\tau^{2} = \sigma^{2} c^{2} dt^{2} - \frac{dr^{2}}{\sigma^{2}} - r^{2} d\theta^{2} - r^{2} \sin^{2}\theta \, d\phi^{2} \tag{33} \]with:
\[ \sigma = \sqrt{1 - \frac{2GM}{c^{2} r}} = \sqrt{1 - \frac{R_{s}}{r}}, \qquad R_{s} = \frac{2GM}{c^{2}} \]For a planet moving in the equatorial plane \(\left( \theta = \frac{\pi}{2}\right)\) this simplifies to:
\[ 1 = \left(1 - \frac{R_{s}}{r}\right) \left(\frac{dt}{d\tau}\right)^{2} - \frac{1}{c^{2}} \left(1 - \frac{R_{s}}{r}\right)^{-1} \left(\frac{dr}{d\tau}\right)^{2} - \frac{1}{c^{2}} r^{2} \left(\frac{d\phi}{d\tau}\right)^{2} \]4.4.3 Derivation of the precession via the Lagrangian approach (see Appendix 12)
Although we previously derived the expressions for the energy E (equation_3.2_9) and the angular momentum L (equation_3.2_11), we repeat the derivation here starting from the Lagrangian. We parameterize the orbit as:
\[ x^{\mu}(\tau) = \bigl( t(\tau), r(\tau), \theta(\tau), \phi(\tau) \bigr) \]with \(\tau\) the proper time. In the equatorial plane \(\theta =\frac{\pi}{2}\) the Lagrangian becomes:
\[ \mathcal{L} = \left(1 - \frac{R_{s}}{r}\right) \left(\frac{dt}{d\tau}\right)^{2} - \frac{1}{c^{2}} \left(1 - \frac{R_{s}}{r}\right)^{-1} \left(\frac{dr}{d\tau}\right)^{2} - \frac{1}{c^{2}} r^{2} \left(\frac{d\phi}{d\tau}\right)^{2} \tag{34} \]The Euler–Lagrange equations for ∅ and t give:
\[ \frac{d\phi}{d\tau} = \dot{\phi}, \qquad \frac{dt}{d\tau} = \dot{t}. \]The Lagrangian then becomes:
\[ \mathcal{L} = \left(1 - \frac{R_s}{r}\right)\dot{t}^{\,2} - \frac{1}{c^{2}}\left(1 - \frac{R_s}{r}\right)^{-1}\dot{r}^{\,2} - \frac{1}{c^{2}}\, r^{2}\dot{\phi}^{\,2}. \]4.4.4 Euler–Lagrange Operation
For \(\phi\):
\[ \frac{d}{d\tau}\left( \frac{\partial \mathcal{L}}{\partial \dot{\phi}} \right) = \frac{\partial \mathcal{L}}{\partial \phi} = 0, \]
and for \( t \):
\[ \frac{d}{d\tau}\left( \frac{\partial \mathcal{L}}{\partial \dot{t}} \right) = \frac{\partial \mathcal{L}}{\partial t} = 0. \]
Thus the Euler–Lagrange equations for \( \phi \) and \( t \) yield:
\[ 0 = \frac{d}{d\tau}\left(2 \frac{1}{c^{2}} r^{2}\frac{d\phi}{d\tau} \right) \quad\Rightarrow\quad r^{2}\frac{d\phi}{d\tau} = \text{constant} = L, \]
\[ 0 = \frac{d}{d\tau}\left[ 2\left(1 - \frac{R_s}{r}\right)\frac{dt}{d\tau} \right] \quad\Rightarrow\quad \left(1 - \frac{R_s}{r}\right)\frac{dt}{d\tau} = \text{constant} = \frac{E}{c^{2}}. \]
Hence \(L\) (angular momentum per unit mass) and \(E\) (energy per unit mass) are constants of motion.
We now rewrite the original normalization condition.
The normalization condition is:
\[ 1 = \left(1 - \frac{R_s}{r}\right)\left(\frac{dt}{d\tau}\right)^{2} - \frac{1}{c^{2}}\left(1 - \frac{R_s}{r}\right)^{-1}\left(\frac{dr}{d\tau}\right)^{2} - \frac{1}{c^{2}} r^{2}\left(\frac{d\phi}{d\tau}\right)^{2}. \]
We substitute the constants \(E\) and \(L\):
\[ 1 = \frac{\frac{E^{2}}{c^{4}}}{1-\frac{R_s}{r}} - \frac{1}{c^{2}}\frac{\left(\frac{dr}{d\tau}\right)^{2}}{1 - \frac{R_s}{r}} - \frac{L^{2}}{c^{2} r^{2}}. \]
\[ 1 - \frac{R_s}{r} = \frac{E^{2}}{c^{4}} - \frac{1}{c^{2}}\left(\frac{dr}{d\tau}\right)^{2} - \frac{L^{2}}{c^{2}r^{2}} + \frac{R_s L^{2}}{c^{2} r^{3}}. \]
Thus:
\[ \left(\frac{dr}{d\tau}\right)^{2} = c^{2}\left(\frac{E^{2}}{c^{4}} - 1\right) + c^{2}\frac{R_s}{r} - \frac{L^{2}}{r^{2}} + \frac{R_s L^{2}}{r^{3}}. \]
Using:
\[ \frac{dr}{d\tau} = \frac{dr}{d\phi}\frac{d\phi}{d\tau} = \frac{dr}{d\phi}\frac{L}{r^{2}} \quad\Rightarrow\quad \left(\frac{dr}{d\phi}\right)^{2} = \frac{r^{4}}{L^{2}}\,\left(\frac{dr}{d\tau}\right)^{2}, \]
we obtain:
\[ \left(\frac{dr}{d\phi}\right)^{2} = \frac{r^{4}}{L^{2}} \left[ c^{2}\left(\frac{E^{2}}{c^{4}} - 1\right) + c^{2}\frac{R_s}{r} - \frac{L^{2}}{r^{2}} + \frac{R_s L^{2}}{r^{3}} \right]. \]
This can be written as:
\[ \left(\frac{dr}{d\phi}\right)^{2} = \text{Newtonian terms} \;+\; \text{relativistic correction}. \]The extra term \( \frac{R_s L^{2}}{r^{3}} \) in the effective potential is what causes the perihelion precession.
After simplification:
\[ \left(\frac{dr}{d\phi}\right)^{2} = \frac{c^{2}}{L^{2}}\left(\frac{E^{2}}{c^{4}} - 1\right) r^{4} + \frac{c^{2}R_s}{L^2} r^{3} - r^{2} + R_s r. \]From this we obtain:
\[ d\phi = \frac{dr}{ \sqrt{ \frac{c^{2}}{L^{2}}\left(\frac{E^{2}}{c^{4}} - 1\right) r^{4} + \frac{c^{2}R_s}{L^2} r^{3} - r^{2} + R_s r }}. \]4.4.5 Precession of the orbit
For a closed orbit the radial motion must be bounded, i.e. \(dr/d\phi = 0\) at two points: the perihelion \(P\) and the aphelion \(A\). But for a non‑closed orbit (precession), the angular shift between perihelion \(P\) and aphelion \(A\) is:
\[ \phi_{A} - \phi_{P} = \int_{P}^{A} \frac{dr}{ \sqrt{ \frac{c^{2}}{L^{2}} \left(\frac{E^{2}}{c^{4}} - 1\right) r^{4} + \frac{c^{2} R_{s}}{L^2} r^{3} - r^{2} + R_{s} r } } \tag{35} \]To express \(E\) and \(L\) in terms of \(A\), \(P\), and \(R_s\), we impose \(\frac{dr}{d\phi}=0\) at \(r=A\) and \(r=P\). This yields the following equations:
\[ c^{2}\left(\frac{E^{2}}{c^{4}} - 1\right)A^{4} + L^{2}(- A^{2}+ R_{s}A) = -c^{2}R_{s}A^{3} \tag{36} \] \[ c^{2}\left(\frac{E^{2}}{c^{4}} - 1\right)P^{4} + L^{2}(- P^{2}+ R_{s}P) = -c^{2}R_{s}P^{3} \tag{37} \]By suitable combinations and subtractions of these equations, we can express \(\frac{E^{2}}{c^{4}} - 1\) and \(L^{2}\) entirely in terms of \(A\), \(P\), and \(R_s\). (Details in the original derivation.)
Multiply (36) by \((-P^{2}+R_{s}P)\):
\[ c^{2}\left(\frac{E^{2}}{c^{4}} - 1\right)A^{4}(-P^{2}+R_{s}P) + L^{2}(-A^{2}+R_{s}A)(-P^{2}+R_{s}P) = -c^{2}R_{s}A^{3}(-P^{2}+R_{s}P) \]Multiply (37) by \((-A^{2}+R_{s}A)\):
\[ c^{2}\left(\frac{E^{2}}{c^{4}} - 1\right)P^{4}(-A^{2}+R_{s}A) + L^{2}(-P^{2}+R_{s}P)(-A^{2}+R_{s}A) = -c^{2}R_{s}P^{3}(-A^{2}+R_{s}A) \]Subtract the two equations:
\[ c^{2}\left(\frac{E^{2}}{c^{4}} - 1\right) \left[ A^{4}(-P^{2}+R_{s}P) - P^{4}(-A^{2}+R_{s}A) \right] = -c^{2}R_{s}A^{3}(-P^{2}+R_{s}P) + c^{2}R_{s}P^{3}(-A^{2}+R_{s}A) \]Thus:
\[ c^{2}\left(\frac{E^{2}}{c^{4}} - 1\right) = \frac{ -c^{2}R_{s}A^{3}(-P^{2}+R_{s}P) + c^{2}R_{s}P^{3}(-A^{2}+R_{s}A) }{ A^{4}(-P^{2}+R_{s}P) - P^{4}(-A^{2}+R_{s}A) } \]Therefore:
\[ \frac{E^{2}}{c^{4}} - 1 = \frac{ -R_{s}A^{3}(-P^{2}+R_{s}P) + R_{s}P^{3}(-A^{2}+R_{s}A) }{ [A^{4}(-P^{2}+R_{s}P) - P^{4}(-A^{2}+R_{s}A)] } \] \[ \frac{E^{2}}{c^{4}} - 1 = \frac{ -R_{s}[A^{3}(-P^{2}+R_{s}P) - P^{3}(-A^{2}+R_{s}A) }{ [A^{4}(-P^{2}+R_{s}P) - P^{4}(-A^{2}+R_{s}A)] } \] \[ \frac{E^{2}}{c^{4}} - 1 = \frac{ -R_{s}[A^{3}P(-P+R_{s}) - P^{3}A(-A+R_{s}) }{ [A^{4}P(-P+R_{s}) - P^{4}A(-A+R_{s})] } \] \[ \frac{E^{2}}{c^{4}} - 1 = \frac{ -R_{s}AP[A^{2}(-P+R_{s}) - P^{2}(-A+R_{s}) }{ AP[A^{3}(-P+R_{s}) - P^{3}(-A+R_{s})] } \] \[ \frac{E^{2}}{c^{4}} - 1 = \frac{ -R_{s}[A^{2}(-P+R_{s}) - P^{2}(-A+R_{s}) }{ [A^{3}(-P+R_{s}) - P^{3}(-A+R_{s})] } \] \[ \frac{E^{2}}{c^{4}} - 1 = \frac{ -R_{s}[-PA^{2}+R_{s}A^{2}+AP^2-R_sP^2] }{ [-PA^{3}+R_sA^3+AP^3-R_sP^3] } \] \[ \frac{E^{2}}{c^{4}} - 1 = \frac{ -R_{s}[-AP(A-P)+R_s(A^2-P^2)] }{ [-AP(A^2-P^2)+R_s(A^3-P^3)] } \] \[ \frac{E^{2}}{c^{4}} - 1 = \frac{ -R_{s}(A-P)[-AP+R_s(A+P)] }{ (A-P)[-AP(A+P)+R_s\frac{A^3-P^3}{A-P}] } \]Intermezzo to compute \(\frac{A^3-P^3}{A-P}\):
\[ (A^2-P^2)(A+P)=A^3-AP^2+A^2P-P^3 \] \[ A^3-P^3=(A^2-P^2)(A+P)-AP(A-P) \] \[ A^3-P^3=(A-P)(A+P)(A+P)-AP(A-P) \] \[ \Rightarrow\quad \frac{A^3-P^3}{A-P}=(A+P)^2-AP \]Now substitute:
\[ \frac{E^{2}}{c^{4}} - 1 = \frac{ -R_{s}(A-P)[-AP+R_s(A+P)] }{ (A-P)[-AP(A+P)+R_s(A+P)^2-R_sAP] } \] \[ \frac{E^{2}}{c^{4}} - 1 = \frac{ -R_{s}[-AP+R_s(A+P)] }{ [-AP(A+P+R_s)+R_s(A+P)^2] } \] \[ \frac{E^{2}}{c^{4}} - 1 = \frac{ R_{s}[-AP+R_s(A+P)] }{ [AP(A+P+R_s)-R_s(A+P)^2] } \tag{36a} \]Now we can find \(L^2/c^2\) by applying the same method to equations (36) and (37):
\[ c^{2}\left(\frac{E^{2}}{c^{4}} - 1\right)A^{4} + L^{2}(- A^{2}+ R_{s}A) = -c^{2}R_{s}A^{3} \tag{36} \] \[ c^{2}\left(\frac{E^{2}}{c^{4}} - 1\right)P^{4} + L^{2}(- P^{2}+ R_{s}P) = -c^{2}R_{s}P^{3} \tag{37} \]Multiply (36) by \(P^4\):
\[ c^{2}\left(\frac{E^{2}}{c^{4}} - 1\right)A^{4}P^4 + L^{2}(- A^{2}+ R_{s}A)P^4 = -c^{2}R_{s}A^{3}P^4 \]Multiply (37) by \(A^4\):
\[ c^{2}\left(\frac{E^{2}}{c^{4}} - 1\right)A^4P^{4} + L^{2}(- P^{2}+ R_{s}P)A^4 = -c^{2}R_{s}A^4P^{3} \]Subtract:
\[ L^{2}[(-A^2+R_sA)P^4-(-P^2+R_sP)A^4] = -c^2R_sA^3P^4+c^2R_sA^4P^3 \] \[ L^2=\frac{c^2R_sA^3P^3(-P+A)}{(-A^2+R_sA)P^4-(-P^2+R_sP)A^4} \] \[ L^2=\frac{c^2R_sA^3P^3(-P+A)}{(-A+R_s)AP^4-(-P+R_s)PA^4} \] \[ L^2=\frac{c^2R_sA^3P^3(-P+A)}{AP[(-A+R_s)P^3-(-P+R_s)A^3]} \] \[ L^2=\frac{c^2R_sA^2P^2(-P+A)}{[(-A+R_s)P^3-(-P+R_s)A^3]} \] \[ L^2=\frac{c^2R_sA^2P^2(-P+A)}{A^3P-AP^3-(A^3-P^3)R_s} \] \[ L^2=\frac{c^2R_sA^2P^2(-P+A)}{AP(A^2-P^2)-(A^3-P^3)R_s} \] \[ L^2=\frac{c^2R_sA^2P^2}{AP(A+P)-R_s(A+P)^2+APR_s} \] \[ L^2=\frac{c^2R_sA^2P^2}{AP(A+P+R_s)-R_s(A+P)^2} \] \[ \frac{L^2}{c^2}=\frac{R_sA^2P^2}{AP(A+P+R_s)-R_s(A+P)^2} \]Finally we obtain equation (36a) above and the expression for \(L^2/c^2\):
\[ \frac{E^2}{c^4}-1=\frac{-APR_s+(A+P)R_s^2}{AP(A+P+R_s)-R_s(A+P)^2} \] \[ \frac{L^2}{c^2}=\frac{A^2P^2R_s}{AP(A+P+R_s)-R_s(A+P)^2} \]We now introduce the variable:
\[ D=\frac{AP}{A+P} \]to further simplify the expressions. This has the dimension of length. Then the expressions for \(E^2-1\) and \(L^2\) become:
We previously found:
\[ \frac{E^{2}}{c^{4}} - 1 =\frac{ -\frac{R_{s}}{AP} + \frac{R_{s}^{2}}{D\,AP} }{ \frac{1}{D} + \frac{R_{s}}{AP} - \frac{R_{s}}{D^{2}} } \] \[ \frac{L^{2}}{c^{2}} = \frac{R_{s}}{ \frac{1}{D} + \frac{R_{s}}{AP} - \frac{R_{s}}{D^{2}} } \]Thus:
\[ \frac{\frac{L^{2}}{c^{2}}}{ \frac{E^{2}}{c^{4}} - 1 } = \frac{R_{s}}{ -\frac{R_{s}}{AP} + \frac{R_{s}^{2}}{D\,AP} } = \frac{AP}{- 1 + R_{s}/D} \] \[ \frac{ \frac{L^{2}}{c^{2}AP} }{ 1 - \frac{E^{2}}{c^{4}} } = \frac{1}{1 - R_{s}/D} \tag{38} \]We want an expression for \(\varepsilon\), the third non‑zero root of:
\[ \frac{E^{2}/c^{4} - 1}{L^{2}/c^{2}} r^{4} + \frac{R_{s}}{L^2/c^2} r^{3} - r^{2} + R_{s} r = 0 \] \[ \frac{E^2/c^4-1}{L^2/c^2}\left[r^4+\frac{R_s}{E^2/c^4-1}r^3- \frac{L^2/c^2}{E^2/c^4-1}r^2+\frac{L^2/c^2}{E^2/c^4-1}R_sr \right]=0 \]This gives the three non‑zero roots: \(A\), \(P\), and \(\varepsilon\).
The full expression becomes:
\[ \frac{E^2/c^4-1}{L^2/c^2} (r-A)(r-P)(r-\varepsilon) r \]Expanding the four factors:
\[ \frac{E^2/c^4-1}{L^2/c^2}\left[ r^{4} - (A+P+\varepsilon)\, r^{3} + \{AP + \varepsilon(A + P)\}\, r^{2} - \varepsilon AP\, r \right] \]We know that the sum of the three non‑zero roots equals \(\dfrac{R_{s}}{E^{2}/c^{4} - 1}\) (the coefficient of \(r^{3}\) in the standard polynomial form). Thus:
\[ -(A+P+\varepsilon) = \frac{R_{s}}{E^{2}/c^{4} - 1} \]This allows us to relate the roots \(A\), \(P\), and \(\varepsilon\) in terms of \(R_s\), the Schwarzschild radius, and the energy and angular momentum terms.
From the above we know that:
\[ \frac{E^2}{c^4}-1=\frac{R_s[-AP+(A+P)R_s]}{AP(A+P+R_s)-R_s(A+P)^2} \]So we substitute this into the previous relation:
\[ A + P + \varepsilon = \frac{R_{s}}{E^{2}/c^{4} - 1} \] \[ A + P + \varepsilon = R_s\frac{-AP(A+P+R_s)+R_s(A+P)^2}{R_s[-AP+(A+P)R_s]} = \frac{-AP(A+P+R_s)+R_s(A+P)^2}{-AP+(A+P)R_s} \] \[ \varepsilon = \frac{-AP(A+P+R_s)+R_s(A+P)^2}{-AP+(A+P)R_s} - (A+P) \] \[ = \frac{-AP(A+P+R_s)+R_s(A+P)^2+AP(A+P)-(A+P)^2R_s}{-AP+(A+P)R_s} \] \[ \varepsilon = \frac{-AP(A+P+R_s)+AP(A+P)}{-AP+(A+P)R_s} = \frac{-APR_s}{-AP+(A+P)R_s} = \frac{R_s}{1-\frac{(A+P)R_s}{AP}} = \frac{R_s}{1-\frac{R_s}{D}} \]Which gives:
\[ \varepsilon = R_{s}\left(1 - \frac{R_{s}}{D}\right) \tag{39} \]We can now approximate (35) by writing
\[ \frac{E^2/c^4-1}{L^2/c^2}r^4 + \frac{R_s}{L^2/c^2}r^3 - r^2 + R_s r = \frac{E^2/c^4-1}{L^2/c^2} (r-A)(r-P)(r-\varepsilon)\, r \] \[ = \frac{1-E^2/c^4}{L^2/c^2} (A-r)(r-P)(r-\varepsilon)\, r \]Using equation (35) we obtain:
\[ \phi_{A} - \phi_{P} = \sqrt{\frac{L^{2}/c^{2}}{1 - E^{2}/c^{4}}} \int_{P}^{A} \frac{1}{\sqrt{r(A-r)(r-P)(r-\varepsilon)}}\,dr \] \[ = \sqrt{\frac{L^{2}/c^{2}}{1 - E^{2}/c^{4}}} \int_{P}^{A} \frac{1}{\sqrt{r^{2}(A-r)(r-P)\left(1-\frac{\varepsilon}{r}\right)}}\,dr \] \[ = \sqrt{\frac{L^{2}/c^{2}}{1 - E^{2}/c^{4}}} \int_{P}^{A} \frac{1}{r\sqrt{(A-r)(r-P)}} \left(1-\frac{\varepsilon}{r}\right)^{-1/2}\,dr \]Now we use the Taylor expansion
\[ \left(1-\frac{\varepsilon}{r}\right)^{-1/2} \approx 1 + \frac{\varepsilon}{2r}, \]with an error term bounded by:
\[ |\varepsilon| \leq \frac{3}{8}\left(1-\frac{\varepsilon}{r}\right)^{-5/2} \left(\frac{\varepsilon}{r}\right)^{2} \leq \frac{3}{8}\left(1-\frac{\varepsilon}{A}\right)^{-5/2} \left(\frac{\varepsilon}{P}\right)^{2} \]which yields:
\[ \phi_{A} - \phi_{P} = \sqrt{\frac{L^{2}/c^{2}}{1 - E^{2}/c^{4}}} \int_{P}^{A} \left[ \frac{1}{r\sqrt{(A-r)(r-P)}} + \frac{\varepsilon/2}{r^{2}\sqrt{(A-r)(r-P)}} \right]dr \tag{40} \]Note:
In Owen Biesel’s article “The Precession of Mercury’s Perihelion” (25 January 2008), p. 8,
the numerator of the left-hand integral in (40) contains \(1+\varepsilon\).
We believe it should be simply \(1\), and have corrected the formula accordingly.
The first integral of (40) (see sections 4.4.6.1 and 4.4.6.3) in closed form:
\[ \int_{P}^{A} \frac{1}{r\sqrt{(A-r)(r-P)}}\,dr \] \[ = \frac{1}{\sqrt{AP}} \arctan\left[ \frac{(A-r)(r-P)+r^{2}-AP} {2\sqrt{(A-r)(r-P)AP}} \right]_{P}^{A} \] \[ \to \frac{1}{\sqrt{AP}} \left[ \arctan(+\infty) - \arctan(-\infty) \right] = \frac{1}{\sqrt{AP}} \left( \frac{\pi}{2} + \frac{\pi}{2} \right) = \frac{\pi}{\sqrt{AP}} \]The second integral of (40) (see 4.4.6.2) is more involved, but can be evaluated in closed form:
\[ \int_{P}^{A} \frac{\varepsilon/2}{r^{2}\sqrt{(A-r)(r-P)}}\,dr = \frac{\pi\,\varepsilon/2}{2\sqrt{AP}} \frac{A+P}{AP} = \frac{1}{\sqrt{AP}} \frac{\pi\varepsilon}{4D} \]Recognizing that:
\[ \frac{L^{2}}{c^{2}} \frac{AP}{1 - E^{2}/c^{4}} = \frac{1}{1 - R_{s}/D} \]and:
\[ \varepsilon = \frac{R_{s}}{1 - R_{s}/D} \](see (38) and (39) above), we find:
\[ \phi_{A} - \phi_{P} = \frac{1}{\sqrt{AP}} \pi \sqrt{\frac{L^{2}/c^{2}}{1 - E^{2}/c^{4}}} + \frac{1}{\sqrt{AP}} \frac{\pi\varepsilon}{4D} \sqrt{\frac{L^{2}/c^{2}}{1 - E^{2}/c^{4}}} \] \[ = \pi \sqrt{\frac{L^{2}/c^{2}}{AP(1 - E^{2}/c^{4})}} + \frac{\pi\varepsilon}{4D} \sqrt{\frac{L^{2}/c^{2}}{AP(1 - E^{2}/c^{4})}} \] \[ = \pi\sqrt{\frac{1}{1 - R_{s}/D}} + \frac{\pi\varepsilon}{4D} \sqrt{\frac{1}{1 - R_{s}/D}} \] \[ = \frac{\pi}{\sqrt{1 - R_{s}/D}} \left( 1 + \frac{\varepsilon}{4D} \right) \] \[ = \frac{\pi}{\sqrt{1 - R_{s}/D}} \left( 1 + \frac{1}{4D}\frac{R_{s}}{1 - R_{s}/D} \right) \] \[ = \frac{\pi}{\sqrt{1 - R_{s}/D}} \left( 1 + \frac{1}{4}\frac{R_{s}/D}{1 - R_{s}/D} \right) \]With the observed values \(A\text{(aphelion)} = 69.8 \cdot 10^{6}\,\text{km}\), and \(P\text{(perihelion)} = 46.0 \cdot 10^{6}\,\text{km}\), we obtain:
\[ D = 27.7 \cdot 10^{6}\,\text{km}, \qquad R_{s} = \frac{2GM}{c^{2}} = 2.95\,\text{km} \]And we can approximate the term as:
\[ \frac{\pi}{\sqrt{1 - R_{s}/D}} \left( 1 + \frac{1}{4}\frac{R_{s}/D}{1 - R_{s}/D} \right) \approx \pi + 2.512 \cdot 10^{-7} \]This yields a reliable estimate of \(\phi_{A} - \phi_{P}\) (half an orbit, in radians).
This gives:
\[ \Delta \phi = 2.512 \cdot 10^{-7} \text{ radians (half orbit)} \]And:
\[ \Delta \phi = 5.024 \cdot 10^{-7} \text{ radians (full orbit)} \]The orbital period of Mercury is 87.969 days, so Mercury completes 415.2 revolutions per century. Since there are \( 360 \cdot 60 \cdot 60/2\pi \) arcseconds per radian, we find that the perihelion of Mercury shifts by:
\[ \Delta \phi = 5.024 \cdot 10^{-7} \cdot \frac{360 \cdot 60 \cdot 60}{2\pi} \cdot \text{415.2} = \text{43.027 arcseconds per century} \] \[ \Delta \phi = \mathbf{43.027\ arcseconds\ per\ century.} \]Note:
According to Asaf Pe’er, for a small deflection angle, the result (see equation 6 in section 4.7) is:
\[ \delta \phi_{\text{prec}} = \frac{6\pi G M_{\text{sun}}}{c^{2} a (1 - \varepsilon^{2})} \tag{41} \]For Mercury:
- \(a\) is the semi-major axis: \(5.79 \times 10^{10}\,\text{m}\)
- \(\varepsilon\) is the eccentricity: \(0.206\)
- \(M\) is the mass of the Sun: \(1.989 \times 10^{30}\,\text{kg}\)
- \(G\) is the gravitational constant: \(6.674 \times 10^{-11}\,\text{Nm}^{2}\text{kg}^{-2}\)
- \(c\) is the speed of light: \(3 \times 10^{8}\,\text{m/s}\)
To compute the precession per century:
\[ \Delta \phi = 5.02 \times 10^{-7} \times 100 \times \text{365.2588} \times \frac{360 \times 60 \times 60}{2\pi} \] \[ \Delta \phi = \mathbf{43''} \text{ arcseconds per century.} \]This leads to the same result.
This gives us the exact relation for the precession angle of Mercury’s orbit, as described in the result of 43.027 arcseconds per century.
4.4.6 Conclusion
The deviation of Mercury’s orbit due to general relativity is determined by the additional curvature terms in equation (35). The actual precession per orbit can be computed from the deviation of the integral \(\Delta \phi\) relative to \(2\pi\). This theoretical prediction matches the observed deviation of approximately 43 arcseconds per century, an effect that cannot be explained by Newtonian mechanics.
4.4.6.1 Verification of the first integral
Verification of the integrand:
\[ \frac{d}{dr} \left[ \frac{1}{\sqrt{AP}} \arctan \left( \frac{(A - r)(r - P)+r^2-AP} {2\sqrt{(A-r)(r-P)AP}} \right) \right] \stackrel{?}{=} \frac{1}{r\sqrt{(A - r)(r - P)}} \]We know that:
\[ \frac{d}{dx} \arctan x = \frac{1}{1 + x^{2}} \]Therefore:
\[ \frac{1}{\sqrt{AP}} \frac{d}{dr} \left[ \arctan\left( \frac{(A-r)(r-P)+r^{2}-AP}{2\sqrt{(A-r)(r-P)AP}} \right) \right] \]
\[ = \frac{1}{\sqrt{AP}} \frac{1}{ 1+\left( \frac{(A-r)(r-P)+r^{2}-AP}{2\sqrt{(A-r)(r-P)AP}} \right)^{2} } \frac{d}{dr} \left[ \frac{(A-r)(r-P)+r^{2}-AP}{2\sqrt{(A-r)(r-P)AP}} \right] \]
\[ = \frac{1}{\sqrt{AP}} \frac{4(A-r)(r-P)AP}{ 4(A-r)(r-P)AP + \left[(A-r)(r-P)+r^{2}-AP\right]^{2} } \frac{d}{dr} \left[ \frac{(A-r)(r-P)+r^{2}-AP}{2\sqrt{(A-r)(r-P)AP}} \right] \]
\[ = \frac{1}{\sqrt{AP}} \frac{4(A-r)(r-P)AP}{ 4(A-r)(r-P)AP + \left[(A-r)(r-P)+r^{2}-AP\right]^{2} }\times \] \[ \times \left[ \frac{-(r-P)+(A-r)+2r}{2\sqrt{(A-r)(r-P)AP}} - \frac{ AP\left[(A-r)(r-P)+r^{2}-AP\right]\left[-(r-P)+(A-r)\right] }{ 4\left[(A-r)(r-P)AP\right]^{3/2} } \right] \]
\[ = \frac{1}{\sqrt{AP}} \frac{4(A-r)(r-P)AP}{ 4(A-r)(r-P)AP + \left[(A-r)(r-P)+r^{2}-AP\right]^{2} } \times \] \[ \times \left[ \frac{A+P}{2\sqrt{(A-r)(r-P)AP}} - \frac{ AP\left[(A-r)(r-P)+r^{2}-AP\right](Ar-2AP+rP) }{ 4\left[(A-r)(r-P)AP\right]^{3/2} } \right] \]
\[ = \frac{1}{\sqrt{AP}} \frac{4(A-r)(r-P)AP}{ 4(A-r)(r-P)AP + \left[(A-r)(r-P)+r^{2}-AP\right]^{2} } \frac{1}{\sqrt{(A-r)(r-P)AP}} \times \] \[ \times \left[ \frac{2(A+P)}{4} - \frac{ AP(Ar-2AP+rP)(P+A-2r) }{ 4(A-r)(r-P)AP } \right] \]
\[ = \frac{1}{\sqrt{AP}} \frac{ 2(A+P)(A-r)(r-P)AP - AP(Ar-2AP+rP)(P+A-2r) }{ 4(A-r)(r-P)AP + \left[(A-r)(r-P)+r^{2}-AP\right]^{2} } \times \] \[ \times \frac{1}{\sqrt{(A-r)(r-P)AP}} \]
\[ = \frac{1}{AP\sqrt{(A-r)(r-P)}} \times \] \[ \times \frac{ 2(A+P)(A-r)(r-P)AP - AP(Ar-2AP+rP)(P+A-2r) }{ 4(A-r)(r-P)AP + \left[(A-r)(r-P)+r^{2}-AP\right]^{2} } \]
\[ = \frac{1}{\sqrt{(A-r)(r-P)}} \times \] \[ \times \frac{ 2(A+P)(A-r)(r-P) - (Ar-2AP+rP)(P+A-2r) }{ 4(A-r)(r-P)AP + \left[(A-r)(r-P)+r^{2}-AP\right]^{2} } \]
\[ = \frac{1}{\sqrt{(A-r)(r-P)}} \times \] \[ \times \frac{ (2A^{2}-2Ar+2AP-2Pr)(r-P) - (6APr-2AP^{2}+P^{2}r+A^{2}r-2A^{2}P-2Ar^{2}-2Pr^{2}) }{ 4A^{2}Pr - 4APr^{2} - 4A^{2}P^{2} + 4AP^{2}r + (Ar-2AP+Pr)^{2} } \]
\[ = \frac{1}{\sqrt{(A-r)(r-P)}} \times \] \[ \times \frac{ A^{2}r - 2APr + P^{2}r }{ 4A^{2}Pr - 4APr^{2} - 4A^{2}P^{2} + 4AP^{2}r + (Ar-2AP+Pr)^{2} } \]
\[ = \frac{1}{\sqrt{(A-r)(r-P)}} \times \] \[ \times \frac{ r(A^{2}-2AP+P^{2}) }{ 4A^{2}Pr - 4APr^{2} - 4A^{2}P^{2} + 4AP^{2}r + A^{2}r^{2} + 4A^{2}P^{2} + P^{2}r^{2} - 4A^{2}Pr + 2APr^{2} - 4AP^{2}r } \]
\[ = \frac{1}{\sqrt{(A-r)(r-P)}} \frac{ r(A-P)^{2} }{ r^{2}(A-P)^{2} } = \frac{1}{r\sqrt{(A-r)(r-P)}} \]
This confirms that the integration of the integrand is correct!
4.4.6.2 Evaluation of the second integral
We have derived the expression for the second integral:
The general form is:
\[ \int \frac{1}{x^{2}} \sqrt{a x^{2} + b x + c} \, dx = - \frac{\sqrt{a x^{2} + b x + c}}{c x} - \frac{b}{2c} \int \frac{dx}{\sqrt{a x^{2} + b x + c}} \](See also the next section for the evaluation of the integral on the right-hand side.)
\[ \int \frac{1}{x^{2}} \sqrt{a x^{2} + b x + c} \, dx = - \frac{\sqrt{a x^{2} + b x + c}}{c x} - \frac{b}{2c\sqrt{-c}}\arcsin{\frac{bx+2c}{|x|\sqrt{b^{2} -4ac}}}\, ,\quad (c<0) \]Now with \[ a = -1, \quad b = A + P, \quad c = -AP \] we obtain:
\[ \phi_A - \phi_P =\int_P^A \frac{\varepsilon/2}{r^2\sqrt{(A - r)(r - P)}} \, dr = \int_P^A \frac{\varepsilon/2}{r^2\sqrt{(-r^2+(A+P)r-AP}} \, dr \] \[ = -\varepsilon/2 \left[ \frac{\sqrt{-r^2+(A+P)r-AP}}{-APr} \right]_{P}^{A} +\varepsilon/2\frac{A+P}{2AP\sqrt{AP}} \left[ \arcsin \left( \frac{(A+P)r - 2AP} {|r| \sqrt{(A+P)^2 - 4AP}} \right) \right]_P^A \] \[ = 0 + \frac{\varepsilon}{2} \frac{A+P}{2AP\sqrt{AP}} \left[ \arcsin \left( \frac{(A+P)A - 2AP} {|A|\sqrt{(A+P)^2 - 4AP}} \right) - \arcsin \left( \frac{(A+P)P - 2AP} {|P| \sqrt{(A+P)^2 - 4AP}} \right) \right] \] \[ = \frac{\varepsilon}{2} \frac{A+P}{2AP\sqrt{AP}} \left[ \arcsin \left( \frac{(A-P)A}{|A|(A-P)} \right) - \arcsin \left( \frac{(P-A)P}{|P|(A-P)} \right) \right] \] \[ = \frac{\varepsilon}{2} \frac{A+P}{2AP\sqrt{AP}} \left[ \arcsin(1) - \arcsin(-1) \right] \] \[ = \frac{\varepsilon}{2} \frac{A+P}{2AP\sqrt{AP}} \left( \frac{\pi}{2} - \left(-\frac{\pi}{2}\right) \right) \] \[ = \frac{\varepsilon}{2} \frac{\pi(A+P)}{2AP\sqrt{AP}} = \frac{\pi \varepsilon}{4D\sqrt{AP}} \]Thus:
\[ \phi_{A} - \phi_{P} = \frac{\pi \varepsilon}{4D\sqrt{AP}} \]This is in exact agreement with the earlier calculations.
4.4.6.3 Alternative solution for integral 1
According to standard integral formulas, we have:
\[ \int \frac{dx}{x \sqrt{a x^{2} + b x + c}} = \frac{1}{\sqrt{-c}} \arcsin \left( \frac{b x + 2c}{\sqrt{b^{2} - 4ac}} \right)+C, \qquad (c < 0) \]Hence:
\[ \phi_A - \phi_P =\int_P^A \frac{1}{r\sqrt{(A - r)(r - P)}} \, dr = \int_P^A \frac{1}{r\sqrt{(-r^2+(A+P)r-AP}} \, dr \] \[ \frac{1}{\sqrt{AP}}\arcsin\left[\frac{(A+P)r-2AP}{|r|\sqrt{(A+P)^2-4AP}}\right]_P^A \] \[ \frac{1}{\sqrt{AP}} \left[ \arcsin\frac{(A+P)A-2AP}{|A|\sqrt{(A+P)^2-4AP}} - \arcsin\frac{(A+P)P-2AP}{|P|\sqrt{(A+P)^2-4AP}} \right] \] \[ \frac{1}{\sqrt{AP}} \left[ \arcsin\frac{(A-P)A}{|A|(A-P)} - \arcsin\frac{(P-A)P}{|P|(A-P)} \right] \] \[ \frac{1}{\sqrt{AP}} \left[ \arcsin(1) - \arcsin(-1) \right] \] \[ \frac{1}{\sqrt{AP}} \left[ \frac{\pi}{2} - \left( \frac{-\pi}{2} \right) \right] =\frac{\pi}{\sqrt{AP}} \]Thus:
\[ \phi_{A} - \phi_{P} = \frac{\pi}{\sqrt{AP}} \]4.4.6.4 Detailed calculation of the orbital period
From:
\[ L = r^{2} \frac{d\phi}{d\tau} \quad \Rightarrow \quad d\tau = \frac{r^{2}}{L} d\phi \]it follows for the period:
\[ T = \int d\tau = \int_{0}^{2\pi} \frac{r^{2}}{L} d\phi \]Using equation (40):
\[ d\phi = \sqrt{\frac{L^{2}/c^2}{1-E^2/c^4}} \left[ \frac{1}{r\sqrt{(A - r)(r - P)}} + \frac{\varepsilon/2}{r^2\sqrt{(A - r)(r - P)}} \right] dr \tag{40} \] \[ d\tau = \frac{r^2}{L} \sqrt{\frac{L^{2}/c^2}{1-E^2/c^4}} \left[ \frac{1}{r\sqrt{(A - r)(r - P)}} + \frac{\varepsilon/2}{r^2\sqrt{(A - r)(r - P)}} \right] dr \] \[ d\tau = \frac{1}{L} \sqrt{\frac{L^{2}/c^2}{1-E^2/c^4}} \left[ \frac{r}{\sqrt{(A - r)(r - P)}} + \frac{\varepsilon/2}{\sqrt{(A - r)(r - P)}} \right] dr \] \[ \Delta T =\int d\tau = \frac{2}{L} \sqrt{\frac{L^{2}/c^2}{1-E^2/c^4}} \int_P^A \left[ \frac{r}{\sqrt{(A - r)(r - P)}} + \frac{\varepsilon/2}{\sqrt{(A - r)(r - P)}} \right] dr \]First, we evaluate the left integral:
\[ \int_P^A \frac{r}{\sqrt{(A - r)(r - P)}}dr = \int_P^A \frac{r}{\sqrt{-r^2+(A+P)r-AP}} dr \tag{41} \]According to the table of integrals (Wikipedia):
\[ \int \frac{x}{\sqrt{ax^2+bx+c}}dx=\frac{\sqrt{ax^2+bx+c}}{a}- \frac{b}{2a}\int \frac{1}{\sqrt{ax^2+bx+c}}dx \tag{42} \]and:
\[ \int \frac{1}{\sqrt{ax^2+bx+c}}dx=\frac{1}{\sqrt{-a}}\arcsin\frac{-2ax-b}{\sqrt{b^2-4ac}}+C, \quad (a<0) \]To rewrite the left integral into this form:
\[ \int_P^A \frac{r}{\sqrt{-r^{2} + (A + P)r-AP}} \, dr= \] \[ =\left[ \frac{\sqrt{-r^2+(A+P)r-AP}}{-1}\right]_P^A -\frac{A+P}{-2} \int_P^A \frac{1}{\sqrt{-r^{2} + (A + P)r-AP}} \, dr= \] \[ =-\sqrt{A^{2} + (A + P)A-AP}+\sqrt{-P^2+(A+P)P-AP}+\frac{A+P}{2} \int_P^A \frac{1}{\sqrt{-r^{2} + (A + P)r-AP}} \, dr= \] \[ =-0+0+ \frac{A+P}{-2} \int_P^A \frac{1}{\sqrt{-r^{2} + (A + P)r-AP}} \, dr \]Now only the integral:
\[ \int_P^A \frac{1}{\sqrt{-r^{2} + (A + P)r-AP}} \, dr =\left[\arcsin \frac{2r-(A+P)}{\sqrt{(A+P)^2-4AP}}+C \right]_P^A= \] \[ =\arcsin \frac{2A-(A+P)}{\sqrt{(A+P)^2-4AP}}+C-\arcsin \frac{2P-(A+P)}{\sqrt{(A+P)^2-4AP}}+C= \] \[ =\arcsin \frac{A-P}{A-P}-\arcsin \frac{-A+P}{A-P} \] \[ \frac {\pi}{2}+\frac{\pi}{2}=\pi \]Thus, the left integral yields:
\[ \frac{(A+P)\pi}{2} \]The right integral yields:
\[ \pi\frac{\varepsilon}{2} \]The sum is:
\[ \frac{\pi}{2}(A+P+\varepsilon) \]Hence, the total integral for one full revolution is:
\[ \Delta T = \frac{2}{L} \sqrt{\frac{L^{2}/c^{2}}{1 - E^{2}/c^{4}}} \frac{\pi}{2}(A+P+\varepsilon) \]With:
\[ \varepsilon = \frac{R_{s}}{1 - R_{s}/D} \] \[ \Delta T = \frac{2}{L} \sqrt{\frac{L^{2}/c^{2}}{1 - E^{2}/c^{4}}} \frac{\pi}{2} \left( A+P + \frac{R_{s}}{1 - R_{s}/D} \right) \] \[ \Delta T = 2\pi \frac{A+P}{2L} \sqrt{\frac{L^{2}/c^{2}}{1 - E^{2}/c^{4}}} \left( 1 + \frac{R_{s}}{(A+P)(1 - \frac{R_s}{D})} \right) \] \[ \Delta T = 2\pi \frac{A+P}{2L} \sqrt{\frac{AP}{1 - R_s/D}} \left( 1 + \frac{R_{s}}{(A+P)(1 - \frac{R_s}{D})} \right) \]For Mercury:
- \(A = 6.98 \times 10^{10}\,\mathrm{m}\)
- \(P = 4.60 \times 10^{10}\,\mathrm{m}\)
- \(D = 2.77 \times 10^{10}\,\mathrm{m}\)
- \(R_{s(\text{sun})} = 2953.25\,\mathrm{m}\)
The time for one revolution is:
\[ \Delta T = 7\,598\,744\,\mathrm{s} \Rightarrow \frac{7\,598\,744}{24\cdot 3600}= 87.95\,\text{days} \]Derived in chapter Schwarzschild Approximation 4.8.2, equation 2d, the instantaneous orbital speed of Mercury as a function of \(\phi\) is:
\[ v=\left[\frac{GM_{\text{sun}}}{a(1-e^2)}(1+2e\cos[\phi(1-\epsilon)]+e^2)\right]^2 \tag{42a} \]4.4.7 Physical meaning
- Why precession: Due to the curvature of spacetime around the Sun, Mercury’s orbit is not a perfect ellipse, but an ellipse that slowly rotates.
- No Newtonian explanation: This effect cannot be explained by classical mechanics or planetary perturbations alone.
- Empirical confirmation: The measured value of about 43 arcseconds per century was one of the first major successes of general relativity.
4.4.8 Core insight
- The precession of Mercury’s perihelion is a direct and measurable consequence of spacetime curvature as predicted by the Schwarzschild metric.
- The quantitative agreement between theory and observation is one of the strongest confirmations of Einstein’s general theory of relativity.
4.5 Experiment 5 – Shapiro Time Delay
Introduction and Physical Idea
The Shapiro time delay is the effect in which a light signal (or radar pulse) that travels near a massive object (such as the Sun) takes longer to arrive than expected based on a straight-line path in flat spacetime. This is a direct consequence of the curvature of spacetime caused by mass, as predicted by general relativity.
History:
The effect was predicted in 1964 by Irwin Shapiro and has since been confirmed
in many experiments, including radar reflections sent to Venus and Mercury and
measuring the return time.
In the Shapiro experiment, radar signals were sent from Earth to a planet located on the opposite side of the Sun. These signals reflected back to Earth. According to general relativity, the signal that grazes the Sun will be bent by the Sun’s gravitational field — or more precisely, the Sun’s mass distorts spacetime such that the signal follows a “straight curved” path.
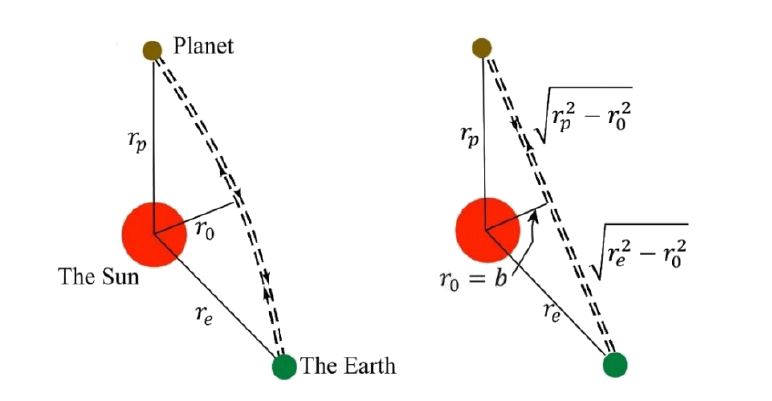
(From Tests of General Relativity: A Review by Estelle Asmodelle (Asmodelle, 2017))
To define the Shapiro delay, we assume that Earth and the planet are stationary, while the total round‑trip time of the radar signal is Δt in coordinate time. The value of t must be expressed in terms of r along the entire path, where r₀ is the closest approach to the Sun.
4.5.1 Derivation Based on the Schwarzschild Metric
For the calculation of the Shapiro delay, the Schwarzschild metric is used:
\[ ds^{2} = c^{2} d\tau^{2} = \sigma^{2} c^{2} dt^{2} - \frac{dr^{2}}{\sigma^{2}} - r^{2} d\theta^{2} - r^{2}\sin^{2}\theta \, d\phi^{2} \]
where
\[ \sigma =\sqrt{ 1 - \frac{2GM_{\text{sun}}}{c^{2} r}} = \sqrt{1 - \frac{R_{s}}{r}} \]
and
\[ R_{s} = \frac{2GM_{\text{sun}}}{c^{2}} \]
is the Schwarzschild radius of the Sun.
We choose the reference frame such that it corresponds to the equatorial plane (\(\theta = \pi/2\)).
Then:
\[ c^2 d\tau^2 = \sigma^2 c^2 dt^2 - \frac{dr^2}{\sigma^2} - r^2 d\phi^2 \]
For photons or radar echoes, \(d\tau = 0\), so:
\[ \sigma^2 c^2 dt^2 = \frac{dr^2}{\sigma^2} + r^2 d\phi^2 \]
Differentiating with respect to the affine parameter \(\lambda\):
\[ \sigma^2 c^2 \left(\frac{dt}{d\lambda}\right)^2 = \frac{1}{\sigma^2} \left(\frac{dr}{d\lambda}\right)^2 + r^2 \left(\frac{d\phi}{d\lambda}\right)^2 \]
As derived in formula 11 of Section 4.2, the angular momentum is:
\[ L = r^2 \frac{d\phi}{d\lambda} \]
and
\[ \sigma^2 c^2 \left(\frac{dt}{d\lambda}\right)^2 = \frac{1}{\sigma^2} \left(\frac{dr}{d\lambda}\right)^2 + \frac{L^2}{r^2} \]
Multiply by \(\sigma^2\):
\[ \sigma^4 c^2 \left(\frac{dt}{d\lambda}\right)^2 = \left(\frac{dr}{d\lambda}\right)^2 + \frac{L^2}{r^2} \sigma^2 \]
Define:
\[ k^2 = \sigma^4 \left(\frac{dt}{d\lambda}\right)^2 \]
(Note: this is also \(k = E/c^2\), as seen in formula 9a of Section 4.2.)
Thus:
\[ \left(\frac{dr}{d\lambda}\right)^2 + \frac{L^2}{r^2} \sigma^2 = k^2 c^2 \]
The energy equation for a photon path in Schwarzschild geometry is therefore:
\[ \left(\frac{dr}{d\lambda}\right)^2 + \frac{L^2}{r^2} \left(1 - \frac{R_s}{r}\right) = k^2 c^2 \tag{42b} \]
As previously derived:
\[ k^2 = \sigma^4 \left(\frac{dt}{d\lambda}\right)^2 \Rightarrow \left(\frac{dt}{d\lambda}\right)^2 = \frac{k^2}{\sigma^4} \]
Using:
\[ \left(\frac{dt}{d\lambda}\right)^2 = \frac{k^2}{(1 - R_s/r)^2} \]
Now:
\[ \left(\frac{dr}{d\lambda}\right)^2 = \left(\frac{dr}{dt} \frac{dt}{d\lambda}\right)^2 = \frac{k^2}{(1 - R_s/r)^2} \left(\frac{dr}{dt}\right)^2 \tag{42c} \]
Rewrite (42b):
\[ \frac{k^2}{(1 - R_s/r)^2} \left(\frac{dr}{dt}\right)^2 + \frac{L^2}{r^2}(1 - R_s/r) = k^2 c^2 \]
Divide by \((1 - R_s/r)\):
\[ \frac{k^2}{(1 - R_s/r)^3} \left(\frac{dr}{dt}\right)^2 + \frac{L^2}{r^2} - \frac{k^2 c^2}{1 - R_s/r} = 0 \]
Then divide by \(k^2\):
\[ \frac{1}{(1 - R_s/r)^3} \left(\frac{dr}{dt}\right)^2 + \frac{L^2}{k^2 r^2} - \frac{c^2}{1 - R_s/r} = 0 \tag{43} \]
Consider now the path of a photon from Earth to another planet (e.g., Venus, with \(r_p = r_v\)), as shown in Figure 2. The photon path is clearly bent by the Sun’s gravitational field. Let \(r_0\) be the coordinate distance of closest approach; then:
\[ \left(\frac{dr}{dt}\right)_{r_0} = 0 \]
From (43) we find the relation between constants:
\[ \frac{L^2}{k^2 r^2} = \frac{c^2}{1 - R_s/r} \]
Rewriting (43):
\[ \left(\frac{dr}{dt}\right)^2 = (1 - R_s/r)^3 \left( \frac{c^2}{1 - R_s/r} - \frac{L^2 r_0^2}{k^2 r_0^2 r^2} \right) \]
\[ = (1 - R_s/r)^2 \left( c^2 - \frac{r_0^2 c^2 (1 - R_s/r)}{r^2 (1 - R_s/r_0)} \right) \]
\[ = c^2 (1 - R_s/r)^2 \left( 1 - \frac{r_0^2 (1 - R_s/r)}{r^2 (1 - R_s/r_0)} \right) \]
\[ \Rightarrow \frac{dr}{dt} = c (1 - R_s/r) \left[ 1 - \frac{r_0^2 (1 - R_s/r)}{r^2 (1 - R_s/r_0)} \right]^{1/2} \]
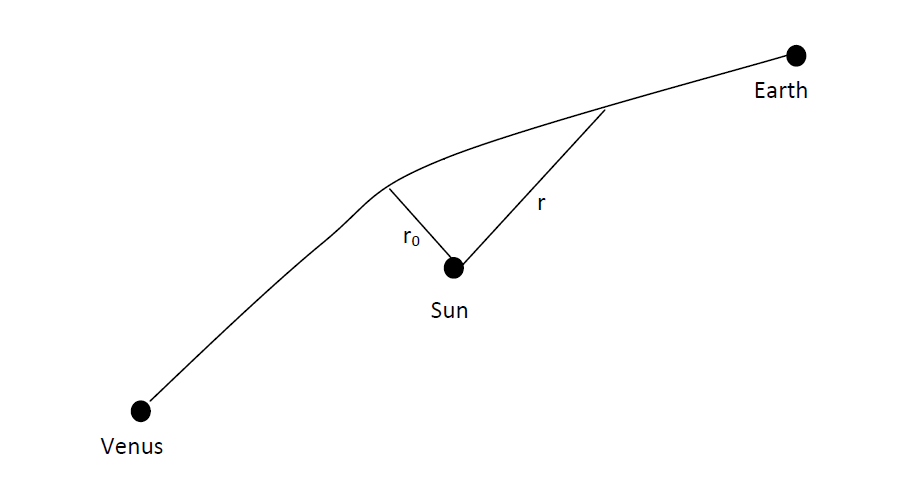
This can be integrated to determine the time required to travel between \(r_0\) and \(r\):
\[ t(r,r_0) = \int_{r_0}^{r} \frac{1}{c(1 - R_s/r) \left[ 1 - \frac{r_0^2 (1 - R_s/r)}{r^2 (1 - R_s/r_0)} \right]^{1/2}} \, dr \]
4.5.1.1 First‑Order Approximation
Because \(R_s \ll r_0\), we may take the first‑order Taylor expansion of:
\[ \frac{1 - R_s/r}{1 - R_s/r_0} \approx \left(1 - \frac{R_s}{r}\right) \left(1 + \frac{R_s}{r_0}\right) = 1 - \frac{R_s}{r} + \frac{R_s}{r_0} - \frac{R_s^2}{r r_0} \]
Thus the integrand can be expanded to first order in \(R_s/r\):
\[ t(r,r_0) = \int_{r_0}^{r} \frac{1}{c(1 - R_s/r) \left[ 1 - \frac{r_0^2}{r^2} \left( 1 - \frac{R_s}{r} + \frac{R_s}{r_0} - \frac{R_s^2}{r r_0} \right) \right]^{1/2}} \, dr \]
Multiply numerator and denominator by \(r\):
\[ t(r,r_0) = \int_{r_0}^{r} \frac{r}{c(1 - R_s/r) \left[ r^2 - r_0^2 \left( 1 - \frac{R_s}{r} + \frac{R_s}{r_0} - \frac{R_s^2}{r r_0} \right) \right]^{1/2}} \, dr \]
\[ t(r,r_0) = \int_{r_0}^{r} \frac{r}{c(1 - R_s/r) \left[ r^2 - r_0^2 - R_s r_0 + \frac{R_s r_0^2}{r} + \frac{R_s^2 r_0}{r} \right]^{1/2}} \, dr \]
\[ t(r,r_0) = \int_{r_0}^{r} \frac{r}{c \sqrt{r^2 - r_0^2} (1 - R_s/r) \left[ 1 - \frac{R_s r_0 (1 - r_0/r - R_s/r)}{r^2 - r_0^2} \right]^{1/2}} \, dr \]
\[ t(r,r_0) = \int_{r_0}^{r} \frac{r}{c \sqrt{r^2 - r_0^2} \left[ \left(1 - \frac{2R_s}{r} + \frac{R_s^2}{r^2}\right) \left( 1 - \frac{R_s r_0 (1 - r_0/r - R_s/r)}{r^2 - r_0^2} \right) \right]^{1/2}} \, dr \]
First expand the right‑hand factor:
\[ \left(1 - \frac{2R_s}{r} + \frac{R_s^2}{r^2}\right) \left( 1 - \frac{R_s r_0 (1 - r_0/r - R_s/r)}{r^2 - r_0^2} \right) \]
\[ 1 - \frac{2R_s}{r} + \frac{R_s^2}{r^2} - \frac{R_s r_0 (1 - r_0/r - R_s/r)}{r^2 - r_0^2} + \frac{2R_s^2 r_0 (1 - r_0/r - R_s/r)}{r(r^2 - r_0^2)} - \frac{R_s^3 r_0 (1 - r_0/r - R_s/r)}{r^2(r^2 - r_0^2)} \]
Neglecting the smallest terms:
\[ \approx 1 - \frac{2R_s}{r} - \frac{R_s r_0 (1 - r_0/r)}{r^2 - r_0^2} \]
\[ \approx 1 - \frac{2R_s}{r} - \frac{R_s r_0 (r - r_0)}{r(r + r_0)(r - r_0)} \]
\[ \approx 1 - \frac{2R_s}{r} - \frac{R_s r_0}{r(r + r_0)} \]
Insert this into the denominator:
\[ t(r,r_0) = \int_{r_0}^{r} \frac{r}{c \sqrt{r^2 - r_0^2} \left[ 1 - \frac{2R_s}{r} - \frac{R_s r_0}{r(r + r_0)} \right]^{1/2}} \, dr \]
Using a first‑order Taylor expansion again:
\[ t(r,r_0) = \int_{r_0}^{r} \frac{r}{c \sqrt{r^2 - r_0^2}} \left[ 1 + \frac{R_s}{r} + \frac{R_s r_0}{2r(r + r_0)} \right] \, dr \]
This can be reduced to (see verification below):
\[ t(r,r_0) = \frac{\sqrt{r^{2} - r_{0}^{2}}}{c} + \frac{R_{s}}{c} \ln\!\left( \frac{r + \sqrt{r^{2} - r_{0}^{2}}}{r_0} \right) + \frac{R_{s}}{2c} \left( \frac{r - r_{0}}{r + r_{0}} \right)^{1/2} \]
Verification of the above formula
We can verify the above formula by taking its derivative; this must be equal to the integrand:
\[ \frac{dt(r,r_0)}{dr} = \frac{r}{c(r^2-r_0^2)^{1/2}} + \frac{R_s}{c} \frac{\left( \frac{1}{r_0}+\frac{r}{r_0(r^2-r_0^2)^{1/2}}\right)}{\frac{r+(r^2-r_0^2)^{1/2}}{r_0}} + \frac{R_s}{4c} \frac{\left(\frac{1}{r+r_0}-\frac{r-r_0}{(r+r_0)^{2}}\right)} {\left( \frac{r-r_0}{r+r_0}\right)^{1/2}} \] \[ \frac{dt(r,r_0)}{dr} = \frac{r}{c(r^2-r_0^2)^{1/2}} + \frac{R_s}{c} \frac{\left( 1+\frac{r}{(r^2-r_0^2)^{1/2}}\right)}{r+(r^2-r_0^2)^{1/2}} + \frac{R_s}{4c} \frac{\left(\frac{r+r_0-r+r_0}{(r+r_0)^{2}}\right)} {\left( \frac{r-r_0}{r+r_0}\right)^{1/2}} \] \[ \frac{dt(r,r_0)}{dr} = \frac{r}{c(r^2-r_0^2)^{1/2}} + \frac{R_s}{c} \frac{\left[ r+(r^2-r_0^2)^{1/2}\right]} {\left[r+(r^2-r_0^2)^{1/2}\right](r^2-r_0^2)^{1/2}} + \frac{R_s}{4c} \frac{\left(r+r_0-r+r_0\right)} {\left( \frac{r-r_0}{r+r_0}\right)^{1/2}(r+r_0)^{2}} \] \[ \frac{dt(r,r_0)}{dr} = \frac{r}{c(r^2-r_0^2)^{1/2}} + \frac{R_s}{c} \frac{1}{(r^2-r_0^2)^{1/2}} + \frac{R_s}{2c} \frac{r_0} {\left( \frac{r-r_0}{r+r_0}\right)^{1/2}(r+r_0)^{2}} \] \[ \frac{dt(r,r_0)}{dr} = \frac{r}{c(r^2-r_0^2)^{1/2}} + \frac{R_s}{c} \frac{1}{(r^2-r_0^2)^{1/2}} + \frac{R_s}{2c} \frac{r_0} {(r-r_0)^{1/2}(r+r_0)} \] \[ \frac{dt(r,r_0)}{dr} = \frac{r}{c(r^2-r_0^2)^{1/2}} \left[ 1+ \frac{R_s}{r}+\frac{R_s r_0}{2r(r+r_0)} \right] \]Thus, the formula is correct!
So we have:
\[ t(r,r_{0}) = \frac{\sqrt{r^{2}-r_{0}^{2}}}{c} + \frac{R_{s}}{c} \ln\!\left( \frac{r + \sqrt{r^{2}-r_{0}^{2}}}{r_0} \right) + \frac{R_{s}}{2c} \left(\frac{r - r_{0}}{r + r_{0}}\right)^{1/2} \]The first term on the right-hand side is exactly what we would expect if the light were to travel in a straight line. The second and third terms give the extra coordinate time required for the photon to travel along the curved path to the point \(r\).
As shown in Figure 2, if we send a radar beam to Venus and back, then the extra coordinate time relative to a straight line is:
\[ \Delta t = 2\left[ t(r_{E},r_{0}) + t(r_{V},r_{0}) - \frac{\sqrt{r_{E}^{2}-r_{0}^{2}}}{c} - \frac{\sqrt{r_{V}^{2}-r_{0}^{2}}}{c} \right] \]As mentioned earlier, the first two terms inside these brackets represent the relativistic travel time from Earth to Venus, and the two terms on the right represent the time if the path were simply a straight line. The factor 2 is included because the photon must go to Venus and then return to Earth.
Since \(r_{E} \gg r_{0}\) and \(r_{V} \gg r_{0}\), we have:
\[ t(r_{E},r_{0}) - \frac{\sqrt{r_{E}^{2}-r_{0}^{2}}}{c} \approx \frac{R_{s}}{c} \ln\!\left( \frac{r_{E} + r_{E}}{r_{0}} \right) + \frac{R_{s}}{2c} = \frac{R_{s}}{c} \ln\!\left( \frac{2r_{E}}{r_{0}} \right) + \frac{R_{s}}{2c} \] \[ t(r_{V},r_{0}) - \frac{\sqrt{r_{V}^{2}-r_{0}^{2}}}{c} \approx \frac{R_{s}}{c} \ln\!\left( \frac{r_{V} + r_{V}}{r_{0}} \right) + \frac{R_{s}}{2c} = \frac{R_{s}}{c} \ln\!\left( \frac{2r_{V}}{r_{0}} \right) + \frac{R_{s}}{2c} \]Summing these contributions gives:
\[ \frac{R_{s}}{c} \ln\!\left(\frac{2r_{E}}{r_{0}}\right) + \frac{R_{s}}{c} \ln\!\left(\frac{2r_{V}}{r_{0}}\right) + \frac{R_{s}}{c} = \frac{2GM}{c^{3}} \left[ \ln\!\left( \frac{4 r_{E} r_{V}}{r_{0}^{2}} \right) + 1 \right] \]Thus, for a round trip to Venus and back, the extra coordinate time delay is:
\[ \Delta t \approx \frac{4GM_{\text{sun}}}{c^{3}} \left[ \ln\!\left( \frac{4 r_{E} r_{V}}{r_{0}^{2}} \right) + 1 \right] \]This also shows that the time delay increases as the impact parameter \(r_{0}\) (the distance to the gravitational center) becomes smaller.
Numerical Values
- For Venus, opposite the Earth on the other side of the Sun: \(\Delta t \approx 252\, \mu s\)
- For Mercury: \(\Delta t \approx 240\, \mu s\)
- Distance Venus–Sun \(r_V : 108 \times 10^9 \, \text{m}\)
- Distance Sun–Earth \(r_E : 150 \times 10^9 \, \text{m}\)
- Total distance Venus–Earth: \(258 \times 10^9 \, \text{m}\)
- Total travel time (Earth → Sun → Venus → Earth) without delay: \(1720\, \text{s}\)
The Shapiro delay is therefore small, but a clearly measurable effect.
4.5.1.2 Proper Time on Earth versus Coordinate Time
Clocks on Earth do not measure coordinate time, due to the rotation of the Earth around its own axis and the effect of the Earth's orbital motion around the Sun.
Because of the Earth's rotation, the corresponding proper time of the signal is given by:
\[
\Delta \tau = \sqrt{1 - \frac{2 G M_E}{c^2 r_E}} \, \Delta t
\]
The effect is therefore: \[ \Delta t - \Delta \tau = \Delta t \sqrt{1 - \frac{2 G M_E}{c^2 r_E}} \, \Delta t \] This gives: \[ \Rightarrow 6.98 \times 10^{-10} \Delta t \,\, \text{for} \,\, 252 \, \mu s \Rightarrow 1.76 \times 10^{-13} \text{ s} = 0.176\, \text{ps} \] \[ p = 10^{-12} \]
Since \( r_E \gg GM/c^2 \), and therefore \(0.176\, \text{ps} \ll 252\, \mu s\), this effect is negligible.
The effect of the Earth's orbital motion around the Sun causes a delay of 15 nanoseconds per second, as mentioned in section (4.6).
For the additional time delay \( \Delta t \approx 252\, \mu s \) from Venus, the Earth's orbital motion causes a small effect of:
\(252 \times 10^{-6} \times 15 \times 10^{-9} = 3.78 \times 10^{-12}\, \text{s} = 3.78\, \text{ps}\), which can also be ignored.
4.5.2 Physical Interpretation
- The additional time delay is a direct consequence of the curvature of spacetime by the Sun.
- The effect is largest when the signal passes close to the Sun (small \(r_0\)).
- Experiments show that the measured delay matches the predictions of general relativity exactly.
4.5.3 Practical Importance
- Important for precise navigation of space missions and testing alternative theories of gravity.
- Used in pulsar timing and in interpreting spacecraft signals.
4.5.4 Core Insight
The Shapiro time delay is one of the four classical experiments confirming general relativity. The effect is small but measurable and fully explained by the Schwarzschild metric.
4.6 Time Relation Between an Observer on Earth and the Center of the Sun
When considering the deflection of light or the orbits of planets around the Sun, a reference frame centered at the Sun is used, while we observe the phenomena from Earth, which rotates relative to the Sun. This section examines the time relation between an observer on Earth and the Sun’s center, including the required correction factors.
The starting point is the Schwarzschild metric, which describes spacetime around a spherically symmetric massive object:
\[ ds^2 = \sigma^2 c^2 dt^2 - \frac{dr^2}{\sigma^2} - r^2 d\theta^2 - r^2 \sin^2\theta \, d\phi^2 \]where:
\[ \sigma = \sqrt{1 - \frac{2 G M_{\text{sun}}}{c^2 r}}, \qquad R_s = \frac{2 G M_{\text{sun}}}{c^2} \]- G is the gravitational constant,
- Msun is the mass of the Sun,
- c is the speed of light,
- r is the distance to the Sun’s center.
The coordinates \(\theta\) and \(\phi\) are the usual spherical coordinates. We restrict ourselves to the equatorial plane of the Sun, so \(\theta = \pi/2\) and the radius \(r\) is constant.
4.6.1 Simplifying the Schwarzschild Metric
For an observer on Earth, we assume the Earth moves in a circular orbit around the Sun. The observer’s time is the proper time \(d\tau\), while \(dt\) is the coordinate time in the Sun’s reference frame.
The Schwarzschild metric reduces to:
\[ ds^2 = c^2 d\tau^2 = \sigma^2 c^2 dt^2 - r^2 d\phi^2 \]This can be rewritten as:
\[ d\tau^2 = \sigma^2 dt^2 - \frac{r^2}{c^2} \left( \frac{d\phi}{dt} \right)^2 dt^2 \]Substituting \(\sigma\) gives:
\[ d\tau^2 = \left( 1 - \frac{R_s}{r} - \frac{r^2}{c^2} \left( \frac{d\phi}{dt} \right)^2 \right) dt^2 \]4.6.2 Time Dilation Due to Gravity and Earth’s Orbital Motion
For an observer on Earth:
\[ d\tau^2 = \left( 1 - \frac{R_s}{r} - \frac{v^2}{c^2} \right) dt^2 \] \[ d\tau = \sqrt{ 1 - \frac{R_s}{r} - \frac{v^2}{c^2} } \, dt \]where \(R_s\) is the Sun’s Schwarzschild radius, \(v\) is Earth’s orbital speed, and \(r\) is the Earth–Sun distance.
Numerical values:
- \( R_s = 2950 \,\text{m} \)
- \( v = 30{,}000 \,\text{m/s} \)
- \( r = 150 \times 10^{9} \,\text{m} \)
Expanding the expression for \(d\tau\) to first order using a Taylor series:
\[ d\tau \approx \left( 1 - \frac{R_s}{2r} - \frac{v^2}{2c^2} \right) dt \]Substituting the numerical values:
\[ d\tau = \left( 1 - 9.9 \times 10^{-10} - 5.0 \times 10^{-9} \right) dt \] \[ d\tau \approx \left( 1 - 1.5 \times 10^{-8} \right) dt \] \[ \Delta t - \Delta \tau = 1.5 \times 10^{-8} \, \Delta t \]This corresponds to a time dilation of approximately 15 nanoseconds per second for an observer on Earth relative to Sun-centered coordinate time.
4.6.3 Correction Factor for Earth’s Gravity
Earth’s own gravity also contributes:
\[ d\tau = \sqrt{ 1 - \frac{2 G M_E}{c^2 r_E} } \, dt \]With:
- \( M_E = 5.9742 \times 10^{24} \,\text{kg} \)
- \( r_E = 6.381 \times 10^{6} \,\text{m} \)
This gives:
\[ d\tau = \sqrt{1 - 1.3908 \times 10^{-9}}\, dt \approx \left( 1 - 0.6954 \times 10^{-9} \right) dt \]For an observer at the equator, Earth’s rotation also matters. The angular velocity is given by the sidereal rotation period \(86162.4\) seconds:
\[ \frac{d\phi}{dt} = \frac{2\pi}{86162.4} = 7.2923 \times 10^{-5} \,\text{rad/s} \]The corrected time relation becomes:
\[ d\tau=\sqrt{\left(1-\frac{R_E}{r^e}-\frac{v_E^2}{c^2}\right)}\,dt \]Substituting the numerical values:
\[ d\tau = \sqrt{ 1 - 1.3908 \times 10^{-9} - 2.4059 \times 10^{-12} } dt \] \[ d\tau \approx \left( 1 - 0.6966 \times 10^{-9} \right) dt \]Where:
- \( R_E = 0.008875 \,\text{m} \) (Earth’s Schwarzschild radius)
- \( r_e = 6{,}381{,}000 \,\text{m} \)
- \( v_E = 465 \,\text{m/s} \)
- \( c = 3 \times 10^{8} \,\text{m/s} \)
4.6.4 Conclusion
The time relation between an observer on Earth and the center of the Sun is determined by three effects: the Sun’s gravity, Earth’s orbital velocity, and Earth’s own gravity. Together they produce a small but measurable time dilation.
4.6.5 Physical Meaning
- Clocks on Earth run slower than a hypothetical clock at the Sun’s center.
- These corrections are essential for GPS, spaceflight, and precision timing.
4.7 Alternative Derivation of the Orbital Equation
According to Kepler’s first law, all planetary orbits around the Sun are elliptical. As shown in section 4.4, general relativity predicts a relativistic correction to the ellipse, explaining the perihelion precession of Mercury.
We therefore present an alternative derivation of the orbital equation for a massive particle in Schwarzschild geometry, yielding a solution closer to the classical ellipse formula.
This is: \[ r(\phi) = a\,\frac{1 - e^{2}}{1 + e \cos(\phi - \theta)} \]
This is compared with the relativistic result (see equation 3.5.5a) at the end of this section: \[ r = a\,\frac{1 - e^{2}}{1 + e \cos(\phi - \epsilon \phi)} \]
Here we see that \( \theta \) is not constant but a function of \( \phi \), changing by a factor \( \epsilon \).
From General Relativity: An Introduction for Physics by M. P. Hobson, G. Efstathiou, and A. N. Lasenby, p. 230 (Hobson, 2006).
We restrict ourselves to the equatorial plane \( \theta = \pi/2 \), so that the Schwarzschild metric for a massive particle reduces to: \[ c^{2} d\tau^{2} = c^{2}\left(1 - \frac{2GM}{c^{2} r}\right) dt^{2} - \left(1 - \frac{2GM}{c^{2} r}\right)^{-1} dr^{2} - r^{2} d\phi^{2} \]
The metric equation then becomes: \[ c^{2}\left(1 - \frac{2GM}{c^{2} r}\right) \left(\frac{dt}{d\tau}\right)^{2} - \left(1 - \frac{2GM}{c^{2} r}\right)^{-1} \left(\frac{dr}{d\tau}\right)^{2} - r^{2}\left(\frac{d\phi}{d\tau}\right)^{2} = c^{2} \]
After multiplying by \( 1 - \frac{2GM}{c^{2} r} \), we obtain: \[ c^{2}\left(1 - \frac{2GM}{c^{2} r}\right)^{2} \left(\frac{dt}{d\tau}\right)^{2} - \left(\frac{dr}{d\tau}\right)^{2} - r^{2}\left(\frac{d\phi}{d\tau}\right)^{2} \left(1 - \frac{2GM}{c^{2} r}\right) = c^{2}\left(1 - \frac{2GM}{c^{2} r}\right) \]
Rearranging: \[ \left(\frac{dr}{d\tau}\right)^{2} + r^{2}\left(\frac{d\phi}{d\tau}\right)^{2} \left(1 - \frac{2GM}{c^{2} r}\right) - c^{2}\left(1 - \frac{2GM}{c^{2} r}\right)^{2} \left(\frac{dt}{d\tau}\right)^{2} = c^{2}\left(\frac{2GM}{c^{2} r} - 1\right) \]
We now substitute the conserved quantities:
\[ \left(1 - \frac{2GM}{c^{2} r}\right)\frac{dt}{d\tau} = \frac{E}{c^{2}}, \qquad r^{2}\frac{d\phi}{d\tau} = L \]
We then obtain:
\[ \left(\frac{dr}{d\tau}\right)^{2} + \frac{L^{2}}{r^{2}}\left(1 - \frac{2GM}{c^{2} r}\right) - \frac{E^{2}}{c^{2}} = c^{2}\left(\frac{2GM}{c^{2} r} - 1\right) = \frac{2GM}{r} - c^{2} \]
\[ \left(\frac{dr}{d\tau}\right)^{2} + \frac{L^{2}}{r^{2}}\left(1 - \frac{2GM}{c^{2} r}\right) - \frac{2GM}{r} = c^{2}\left(\frac{E^{2}}{c^{4}} - 1\right) \]
\[ \left(\frac{dr}{d\tau}\right)^{2} + \frac{L^{2}}{r^{2}} = c^{2}\left(\frac{E^{2}}{c^{4}} - 1\right) + \frac{2GM}{r} + \frac{2GM L^{2}}{c^{2} r^{3}} \]
Now: \[ \frac{dr}{d\tau} = \frac{dr}{d\phi}\frac{d\phi}{d\tau} = \frac{L}{r^{2}}\frac{dr}{d\phi} \]
This substituted into the previous equation gives:
\[ \left(\frac{L}{r^{2}}\frac{dr}{d\phi}\right)^{2} + \frac{L}{r^{2}} = c^{2}\left(\frac{E^{2}}{c^{4}} - 1\right) + 2GM r + \frac{2GM L^{2}}{c^{2} r^{3}} \]
Dividing by \(L^{2}\):
\[ \left(\frac{1}{r^{2}}\frac{dr}{d\phi}\right)^{2} + \frac{1}{r^{2}} = \frac{c^{2}}{L^{2}}\left(\frac{E^{2}}{c^{4}} - 1\right) + \frac{2GM}{L^{2} r} + \frac{2GM}{c^{2} r^{3}} \]
Now substitute \(u = 1/r\): \[ \frac{du}{d\phi} = \frac{du}{dr}\frac{dr}{d\phi} = -\frac{1}{r^{2}}\frac{dr}{d\phi} \quad\Rightarrow\quad \frac{1}{r^{2}}\frac{dr}{d\phi} = -\frac{du}{d\phi} \]
Thus the equation becomes:
\[ \left(\frac{du}{d\phi}\right)^{2} + u^{2} = \frac{c^{2}}{L^{2}}\left(\frac{E^{2}}{c^{4}} - 1\right) + \frac{2GM}{L^{2}}u + \frac{2GM}{c^{2}}u^{3} \]
We differentiate this equation with respect to \( \phi \) to obtain: \[ 2\frac{du}{d\phi}\frac{d^{2}u}{d\phi^{2}} + 2u\frac{du}{d\phi} = \frac{2GM}{L^{2}}\frac{du}{d\phi} + 6\frac{GM}{c^{2}}u^{2}\frac{du}{d\phi} \]
Dividing by \(2\,\frac{du}{d\phi}\) (assuming \(\frac{du}{d\phi} \neq 0\)):
\[ \frac{d^{2}u}{d\phi^{2}} + u = \frac{GM}{L^{2}} + \frac{3GM}{c^{2}}u^{2} \tag{44} \]
If we temporarily ignore the last term, we obtain the Newtonian equation, whose solution is: \[ u = \frac{GM}{L^{2}}\left(1 + e\cos\phi\right) \quad\text{or}\quad r = \frac{L^{2}}{GM}\,\frac{1}{1 + e\cos\phi} \tag{45} \]
This describes an ellipse, where the parameter \(e\) represents the eccentricity of the orbit. The distance to the closest point (perihelion) is: \[ r_{1} = a(1 - e) \] and the farthest point (aphelion) is: \[ r_{2} = a(1 + e). \]
Derived from (45) and substituting again with \( r = 1/u \): \[ r = \frac{L^{2}}{GM}\,\frac{1}{1 + e\cos\phi} \quad\Rightarrow\quad r_{\max} = \frac{L^{2}}{GM}\,\frac{1}{1 - e}, \qquad r_{\min} = \frac{L^{2}}{GM}\,\frac{1}{1 + e}. \]
The semi-major axis \(a\) is then: \[ a = \frac{r_{\max} + r_{\min}}{2} = \frac{L^{2}}{2GM} \left( \frac{1}{1 - e} + \frac{1}{1 + e} \right) = \frac{L^{2}}{2GM} \left( \frac{1 + e + 1 - e}{1 - e^{2}} \right) \]
Thus the equation of motion requires that the semi-major axis is: \[ a = \frac{L^{2}}{GM}\,\frac{1}{1 - e^{2}} \tag{46} \]
Thus: \[ r_{\max} = \frac{L^{2}}{GM}\,\frac{1}{1 - e} = a(1 + e), \qquad r_{\min} = \frac{L^{2}}{GM}\,\frac{1}{1 + e} = a(1 - e). \]
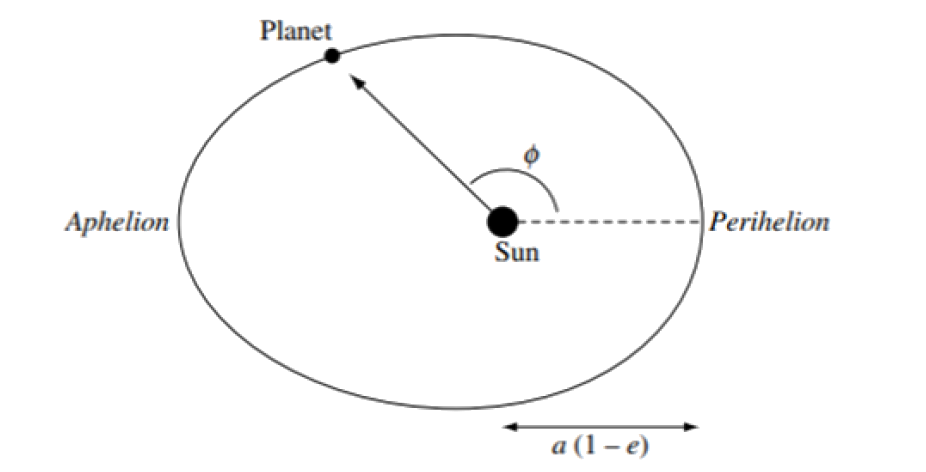
Now, to include the third term (from equation 44), the solution becomes: \[ u = \frac{GM}{L^{2}}\left(1 + e\cos\phi\right) + \Delta u \tag{47} \]
\[ \frac{du}{d\phi} = -\frac{GM}{L^{2}}\,e\sin\phi + \frac{d\Delta u}{d\phi}, \qquad \frac{d^{2}u}{d\phi^{2}} = -\frac{GM}{L^{2}}\,e\cos\phi + \frac{d^{2}\Delta u}{d\phi^{2}} \]
Substituting this into equation (44): \[ \frac{d^{2}u}{d\phi^{2}} + u = \frac{GM}{L^{2}} + \frac{3GM}{c^{2}}u^{2} \tag{44} \]
\[ \frac{d^{2}u}{d\phi^{2}} + u = \frac{GM}{L^{2}}\left(1 + e\cos\phi - e\cos\phi\right) + \frac{d^{2}\Delta u}{d\phi^{2}} + \Delta u = \frac{GM}{L^{2}} + \frac{d^{2}\Delta u}{d\phi^{2}} + \Delta u \]
\[ \frac{d^{2}\Delta u}{d\phi^{2}} + \Delta u = -\frac{GM}{L^{2}} + \frac{d^{2}u}{d\phi^{2}} + u = -\frac{GM}{L^{2}} + \frac{GM}{L^{2}} + \frac{3GM}{c^{2}}u^{2} = \frac{3GM}{c^{2}}u^{2} \]
A particular solution is: \[ \Delta u = \frac{3(GM)^3}{c^{2}L^{4}} \left[ 1+ e^{2}\left(\frac{1}{2} - \frac{1}{6}\cos(2\phi)\right) + e\phi\sin\phi \right] \tag{48} \]
Now, to include the third term (from equation 44), the solution becomes:
\[ u = \frac{GM}{L^{2}}\left(1 + e\cos\phi\right) + \Delta u \tag{47} \]
\[ \frac{du}{d\phi} = -\frac{GM}{L^{2}}\, e\sin\phi + \frac{d\Delta u}{d\phi}, \qquad \frac{d^{2}u}{d\phi^{2}} = -\frac{GM}{L^{2}}\, e\cos\phi + \frac{d^{2}\Delta u}{d\phi^{2}} \]
We substitute this into formula (44):
\[ \frac{d^{2}u}{d\phi^{2}} + u = \frac{GM}{L^{2}} + \frac{3GM}{c^{2}}u^{2} \tag{44} \]
\[ \frac{d^{2}u}{d\phi^{2}} + u = \frac{GM}{L^{2}}\left(1 + e\cos\phi - e\cos\phi\right) + \frac{d^{2}\Delta u}{d\phi^{2}} + \Delta u = \frac{GM}{L^{2}} + \frac{d^{2}\Delta u}{d\phi^{2}} + \Delta u \]
\[ \frac{d^{2}\Delta u}{d\phi^{2}} + \Delta u = -\frac{GM}{L^{2}} + \frac{d^{2}u}{d\phi^{2}} + u = -\frac{GM}{L^{2}} + \frac{GM}{L^{2}} + \frac{3GM}{c^{2}}u^{2} = \frac{3GM}{c^{2}}u^{2} \]
\[ \frac{d^{2}\Delta u}{d\phi^{2}} + \Delta u = \frac{3GM}{c^{2}} \left[ \left(\frac{GM}{L^{2}}\right)^{2} + \left(\frac{GM}{L^{2}} e\cos\phi\right)^{2} + (\Delta u)^{2} + 2\left(\frac{GM}{L^{2}}\right)^{2} e\cos\phi + 2\frac{GM}{L^{2}}\Delta u + 2\frac{GM}{L^{2}} e\cos\phi\,\Delta u \right] \]
We find that, to first order in \(\Delta u\):
\[ \frac{d^{2}\Delta u}{d\phi^{2}} + \Delta u = \frac{3(GM)^{3}}{c^{2}L^{4}} \left(1 + e^{2}\cos^{2}\phi + 2e\cos\phi\right) \]
A particular solution of the equation is:
\[ \Delta u = \frac{3(GM)^{3}}{c^{2}L^{4}} \left[ 1 + e^{2}\left(\frac{1}{2} - \frac{1}{6}\cos 2\phi\right) + e\phi\sin\phi \right] \tag{48} \]
This can be verified by direct differentiation of (48):
\[ \frac{d\Delta u}{d\phi} = \frac{3(GM)^{3}}{c^{2}L^{4}} \left[ \frac{1}{3}e^{2}\sin 2\phi + e\sin\phi + e\phi\cos\phi \right] \]
\[ \frac{d^{2}\Delta u}{d\phi^{2}} = \frac{3(GM)^{3}}{c^{2}L^{4}} \left[ \frac{2}{3}e^{2}\cos 2\phi + e\cos\phi + e\cos\phi - e\phi\sin\phi \right] \]
Substituting into (48):
\[ \frac{d^{2}\Delta u}{d\phi^{2}} + \Delta u = \frac{3(GM)^{3}}{c^{2}L^{4}} \left[ \frac{2}{3}e^{2}\cos 2\phi + 2e\cos\phi - e\phi\sin\phi + 1 + e^{2}\left(\frac{1}{2} - \frac{1}{6}\cos 2\phi\right) + e\phi\sin\phi \right] \]
\[ \frac{d^{2}\Delta u}{d\phi^{2}} + \Delta u = \frac{3(GM)^{3}}{c^{2}L^{4}} \left(1 + \tfrac{1}{2}e^{2} + \tfrac{1}{2}e^{2}\cos 2\phi + 2e\cos\phi\right) \]
So, equation (44) is correct.
Now we substitute \(\Delta u\) into equation (3):
\[ u = \frac{GM}{L^{2}}\left(1 + e\cos\phi\right) + \Delta u \]
\[ u = \frac{GM}{L^{2}}\left(1 + e\cos\phi\right) + \frac{3(GM)^{3}}{c^{2}L^{4}} \left[ 1 + e^{2}\left(\frac{1}{2} - \frac{1}{6}\cos 2\phi\right) + e\phi\sin\phi \right] \]
Since the constant \(\frac{3(GM)^{3}}{c^{2}L^{4}}\) is very small, the last three terms can be neglected.
However, the term \[ e\,\frac{3(GM)^{3}}{c^{2}L^{4}}\,\phi\sin\phi \] must be retained because it grows with \(\phi\).
Thus: \[ u = \frac{GM}{L^{2}} \left[ 1 + e\left(\cos\phi + \frac{3(GM)^{2}}{c^{2}L^{2}}\,\phi\sin\phi\right) \right] +\frac{3(GM)^{3}}{c^{2}L^{4}} \left[ 1+e^2\left(\frac{1}{2}- \frac{1}{6}\cos{2\phi} \right) \right] \]
So, our approximate solution is: \[ u = \frac{GM}{L^{2}} \left[ 1 + e\left(\cos\phi + \frac{3(GM)^{2}}{c^{2}L^{2}}\,\phi\sin\phi\right) \right] \] Using the relationship: \[ \cos\left[\phi\left(1 - \frac{3(GM)^{2}}{c^{2}L^{2}}\right)\right] =\cos\left(\phi - \frac{3(GM)^{2}\phi}{c^{2}L^{2}}\right)= \] \[ \cos{\phi}\cos{\frac{3(GM)^{2}}{c^{2}L^{2}}\phi}+\sin{\phi}\sin{\frac{3(GM)^{2}}{c^{2}L^{2}}\phi} \] \[ \approx \cos\phi + \frac{3(GM)^{2}}{c^{2}L^{2}}\phi\sin\phi \quad \text{for }\,\,\frac{3(GM)^{2}}{c^{2}L^{2}}\ll 1 \] We can now write: \[ u\approx \frac{GM}{L^{2}} \left\{ 1 + e\cos\left[\phi\left(1- \frac{3(GM)^{2}}{c^{2}L^{2}}\right)\right]\right\} =\frac{GM}{L^{2}} \left\{ 1 + e\cos\left[\phi(1 - \epsilon)\right] \right\} \] we obtain:
\[ u \approx \frac{GM}{L^{2}} \left[ 1 + e\cos\left(\phi(1 - \epsilon)\right) \right], \qquad \epsilon = \frac{3(GM)^{2}}{c^{2}L^{2}} \]
For \(r = 1/u\), we get:
\[ r = \frac{L^{2}}{GM\left(1 + e\cos[\phi(1 - \epsilon)]\right)} \tag{5} \]
This expression shows that the orbit is periodic, but with a period: \[ \frac{2\pi}{1 - \epsilon}. \] Thus the orbit does not close perfectly and instead precesses.
After each complete orbit, the ellipse is rotated by: \[ \Delta\phi = 2\pi\epsilon. \]
After each complete orbit, the ellipse is slightly rotated around the focal point, by an angle:
\[ \Delta\phi = \frac{2\pi}{1-\epsilon} - 2\pi = \frac{2\pi\epsilon}{1-\epsilon} \approx 2\pi\epsilon = \frac{6\pi (GM)^2}{c^{2}L^{2}}. \]
We replace \(L\) using equation (2): \[ a = \frac{L^{2}}{GM}\,\frac{1}{1 - e^{2}} \tag{2} \]
By substituting this expression into equation (5): \[ r = \frac{L^{2}}{GM\left\{1 + e\cos\left[\phi(1-\epsilon)\right]\right\}} \tag{5} \]
we obtain the following for the trajectory: \[ r = \frac{a(1 - e^{2})}{1 + e\cos\left[\phi(1-\epsilon)\right]} \tag{5a} \]
With: \[ \epsilon = \frac{3(GM)^2}{c^{2}L^{2}} \qquad\text{or}\qquad \epsilon = \frac{3(GM)^2}{c^{2}GM\,a(1 - e^{2})} = \frac{3GM}{c^{2}a(1 - e^{2})}. \]
Derived from Kepler’s third law: \[ T^{2} = \frac{4\pi^{2}a^{3}}{G(M+m)} \approx \frac{4\pi^{2}a^{3}}{GM} \quad\Rightarrow\quad T = 2\pi\,a\,\sqrt{\frac{a}{GM}}. \]
For the velocity \(v\): \[ v = \frac{L}{r\cos\alpha} = \frac{\sqrt{aGM(1 - e^{2})}}{a(1 - e^{2})} \,\frac{1 + e\cos\left[\phi(1-\epsilon)\right]}{\cos\alpha} \]
Thus: \[ v = \sqrt{\frac{GM}{a(1 - e^{2})}} \,\frac{1 + e\cos\left[\phi(1-\epsilon)\right]}{\cos\alpha} \]
where: \[ \epsilon = \frac{3(GM)^2}{c^{2}L^{2}} = \frac{3(GM)^2}{c^{2}aGM(1 - e^{2})} = \frac{3GM}{c^{2}a(1 - e^{2})}. \]
Because: \[ L^{2} = aGM(1 - e^{2}), \]
substitution gives: \[ \Delta\phi = \frac{6\pi (GM)^2}{c^{2}aGM(1 - e^{2})}. \]
Ultimately, we obtain the following for the precession angle: \[ \Delta\phi = \frac{6\pi GM}{a(1 - e^{2})c^{2}} \tag{6} \]

We apply equation (6) to the orbit of Mercury, with the following parameters:
- period = 88 days
- \( a = 5.8 \times 10^{10}\,\text{m} \)
- e = 0.2
- \( M_s = 2 \times 10^{30}\,\text{kg} \)
We find: \[ T = \sqrt{\frac{4\pi^{2} a^{3}}{GM}} = 87.95\ \text{days} \] \[ \Delta\phi = \frac{6\pi GM}{a(1 - e^{2})c^{2}} = 5.02 \times 10^{-7}\ \text{rad per cycle} \]
To calculate the precession per century: \[ \Delta\phi = 5.02 \times 10^{-7} \times \left(100 \times \frac{365.25}{88}\right) \times \left(\frac{360 \times 60 \times 60}{2\pi}\right) \] \[ \Delta\phi = 43''\ \text{arcseconds per century}. \]
In reality, the measured precession is: \[ 5599''.7 \pm 0.4''\ \text{per century}. \]
The vast majority of this is caused by gravitational influences from other planets. But after correcting for these disturbances, a residual deviation remains that agrees remarkably well with the prediction of general relativity.
For other celestial bodies, we find similar results (in arcseconds per century):
| Object | Observed residual precession | Predicted residual precession |
|---|---|---|
| Mercury | 43.1 ± 0.5 | 43.03 |
| Venus | 8 ± 5 | 8.6 |
| Earth | 5 ± 1 | 3.8 |
| Icarus | 10 ± 1 | 10.3 |
The results therefore match the predictions of general relativity extremely well. Einstein included this calculation for Mercury in his 1915 paper on general relativity. In doing so, he immediately solved one of the major outstanding problems in classical celestial mechanics—an impressive first test of his new, sophisticated theory.
4.8 Calculation of a Projectile Trajectory
As an exercise, we are interested in calculating the trajectory of a projectile using the rules of General Relativity, in contrast to the classical (Newtonian) approach.
For the General Relativistic approach, we assume that the projectile’s path is forced into an elliptical shape by the mass of the Earth. For the calculation we use the Schwarzschild equation. But first, we begin with the Newtonian approximation.
4.8.1 Newtonian Approximation
We consider a projectile fired at an angle, with a horizontal distance D between the launch point and the target, and a maximum height h. The gravitational acceleration is g, and the initial velocity of the projectile has components vx0 (horizontal) and vy0 (vertical).
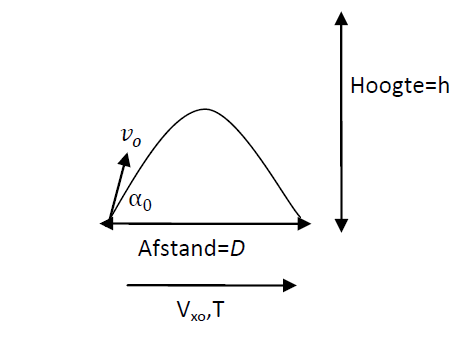
a) Time and Velocity Components
The time required for the projectile to cover the distance D with constant horizontal velocity vx0 is:
\[ v_{x0} = \frac{D}{T} \quad \Rightarrow \quad T = \frac{D}{v_{x0}} \]To cover the distance D, the projectile also needs an upward velocity, otherwise it would hit the ground too early. This requires an initial vertical velocity component vy0. This velocity is determined by the horizontal distance D and the time T. Thus, T is also the time it takes to rise from the ground and fall back down.
Because the motion is symmetric, the time to reach the highest point is:
\[ T_{\text{up}} = \frac{T}{2} \]At this point the vertical velocity is zero. From the equation of motion:
\[ v_y = v_{y0} - g t = 0 \quad \text{at} \quad t = \frac{T}{2} \]This gives:
\[ v_{y0} = g t = g \frac{T}{2} = g \frac{D}{2 v_{x0}} \]b) Height and Relation with Time
The maximum height is reached at time T/2, so:
\[ h = v_{y0} \frac{T}{2} - \frac{1}{2} g \left( \frac{T}{2} \right)^2 \] \[ h = \frac{g D}{2 v_{x0}} \cdot \frac{D}{2 v_{x0}} - \frac{1}{2} g \left( \frac{D}{2 v_{x0}} \right)^2 = \frac{g D^2}{8 v_{x0}^2} \]Inverted, this gives:
\[ v_{x0} = D \sqrt{\frac{g}{8h}} \]When the projectile falls back from the highest point h, it takes T/2 to reach the ground.
c) Total Velocity and Trajectory Parameters
To reach the highest point:
\[ v_{y0} = g \frac{T}{2} = g \sqrt{\frac{2h}{g}} = \sqrt{2 h g} \]The total initial velocity is:
\[ v_0^2 = v_{x0}^2 + v_{y0}^2 = \frac{g D^2}{8 h} + 2 h g = g \frac{D^2 + 16 h^2}{8 h} \] \[ \Rightarrow v_0 = \sqrt{ g \frac{D^2 + 16 h^2}{8 h} } \]Furthermore:
\[ v_{x0} = v_0 \cos \alpha_0 \]The launch angle α0 follows from:
\[ \tan \alpha_0 = \frac{v_{y0}}{v_{x0}} = \frac{\sqrt{2 h g}}{D \sqrt{g/(8h)}} = \frac{4 h}{D} \] \[ \tan \alpha_0 = \frac{4 h}{D} \]d) Trajectory Equation
The y-position as a function of time:
\[ y(t) = v_{y0} t - \frac{1}{2} g t^2 = g \frac{T}{2} t - \frac{1}{2} g t^2 = \frac{1}{2} g t (T - t) \] \[ y(t) = \frac{1}{2} g t \left( \frac{D}{v_{x0}} - t \right) \]In terms of x:
\[ x = v_{x0} t \quad \Rightarrow \quad t = \frac{x}{v_{x0}} \] \[ y(x) = \frac{1}{2} g \frac{x}{v_{x0}} \left( \frac{D}{v_{x0}} - \frac{x}{v_{x0}} \right) = \frac{1}{2} \frac{g}{v_{x0}^2} x (D - x) \]Thus, the trajectory is a parabola:
\[ y(x) = \frac{1}{2} \frac{g}{v_{x0}^2} x (D - x) \]This is therefore a function of the required distance D when the initial horizontal velocity component \(v_{x0}\) is known.
e) Example Calculation
| D (m) | vx0 (m/s) | T (s) | h (m) | v0 (m/s) |
|---|---|---|---|---|
| 10 | 5 | 2 | 4.93 | 11.06 |
| 10 | 500 | 0.02 | 0.000493 | 500 |
| 100 | 5 | 20 | 493 | 99 |
| 100 | 50 | 2 | 4.93 | 51 |
(these values were computed using g = 9.87 m/s²)
f) Next Step
Now that we have fully developed the Newtonian approximation, we can compare it with the calculation based on the Schwarzschild geometry within General Relativity. This comparison follows in the next section.
4.8.2 Schwarzschild Approximation
For this approach, we consider the projectile trajectory as part of an ellipse, with the center of the Earth located at one of the foci. We use the results from the Schwarzschild derivation in Section 4.7, Alternative Derivation of the Orbital Equation.
For the orbital trajectory, the semi-major axis is:
\[ a = \frac{L^2}{G M} \frac{1}{1 - e^2} \tag{2} \]The parameter e is the eccentricity of the projectile’s orbit. The perihelion is:
\[ r_1 = a (1 - e) \]and the aphelion:
\[ r_2 = a (1 + e) \] \[ \Rightarrow e = \frac{r_2 - r_1}{r_2 + r_1} \]For a circular orbit, \(e = 0\) and \(r = r_1 = r_2 = a\).
For an ellipse with the Earth at the left focus:
\[ r(\phi) = \frac{a (1 - e^2)}{1 - e \cos\!\left[\phi(1-\epsilon)\right]} \tag{2a} \]Angle Between Velocity and Radial Vector
We now determine the angle \(α\) between the velocity \(v\) (tangential to the ellipse) and the perpendicular component \(v_{per}\) in order to compute the angular momentum. In this experiment, \(v\) is the total velocity along the ellipse, while \(v_{per}\) is the component perpendicular to \(r(\phi)\).
\[ \tan \alpha = \frac{1}{r} \frac{dr}{d\phi} \] \[ \tan \alpha = \frac{\{1-e\cos[\phi(1-\epsilon)]\}}{a(1-\epsilon^2)}\, \frac{\{a(1-e^2)(1-\epsilon)(e\sin[\phi(1-\epsilon)])\}} {\{1-e\cos[\phi(1-\epsilon)]\}^2} \] \[ \tan \alpha = \frac{dr}{r d\phi} = \frac{e(1-\epsilon)\sin[\phi(1-\epsilon)]} {1 - e \cos[\phi(1-\epsilon)]} \] \[ \alpha = \arctan\left( \frac{e(1-\epsilon)\sin[\phi(1-\epsilon)]} {1 - e \cos[\phi(1-\epsilon)]} \right) \]With:
\[ \cos \alpha = \frac{1}{\sqrt{1 + \tan \alpha}} \]We obtain:
\[ \cos{\alpha} = \left[ 1 + \left( \frac{e(1-\epsilon)\sin[\phi(1-\epsilon)]} {1 - e \cos[\phi(1-\epsilon)]} \right)^2 \right]^{-1/2} \] \[ \cos{\alpha} = \left[ \frac{ 1 - 2 e \cos[\phi(1-\epsilon)] + e^2 \cos^2[\phi(1-\epsilon)] + \{e(1-\epsilon)\sin[\phi(1-\epsilon)]\}^2 } {\{1 - e \cos[\phi(1-\epsilon)]\}^2} \right]^{-1/2} \]Because of the negative square root, we invert the expression:
\[ \cos{\alpha} = \frac{1 - e \cos[\phi(1-\epsilon)]} {\left[ 1 - 2 e \cos[\phi(1-\epsilon)] + e^2 \cos^2[\phi(1-\epsilon)] + (1-2\epsilon+\epsilon^2)e^2\sin^2[\phi(1-\epsilon)] \right]^{1/2}} \] \[ \cos{\alpha} = \frac{1 - e \cos[\phi(1-\epsilon)]} {\left[ 1 - 2 e \cos[\phi(1-\epsilon)] + e^2 \cos^2[\phi(1-\epsilon)] + e^2\sin^2[\phi(1-\epsilon)] - \epsilon(2-\epsilon)e^2\sin^2[\phi(1-\epsilon)] \right]^{1/2}} \] \[ \cos{\alpha} = \frac{1 - e \cos[\phi(1-\epsilon)]} {\left[ 1 - 2 e \cos[\phi(1-\epsilon)] + e^2(1-\epsilon(2-\epsilon)\sin^2[\phi(1-\epsilon)]) \right]^{1/2}} \tag{2b} \]Angular Momentum
The angular momentum L is constant along the ellipse and is given by:
\[ L = v_{per}\cdot r = v \cdot \cos \alpha \cdot r \]At the launch point on the Earth’s surface:
\[ L = v_{x0}\cdot R_{\text{earth}} \]According to the Schwarzschild solution:
\[ L = \sqrt{a G M (1 - e^2)} \]Velocity Along the Ellipse
\[ v = \frac{L}{r \cos \alpha} = \frac{\sqrt{aGM(1 - e^2)}}{a(1-e^2)\cos{\alpha}} (1-e\cos[\phi(1-\epsilon)]) \]This simplifies to:
\[ v = \sqrt{\frac{G M}{a (1 - e^2)}}\, \frac{1 - e \cos[\phi(1-\epsilon)]} {\cos \alpha} \tag{2c} \]Substituting \(\cos{\alpha}\) from (2b) into (2c):
\[ v = \left(\frac{G M}{a (1 - e^2)}\right)^{1/2} \frac{1-e\cos[\phi(1-\epsilon)]}{1-e\cos[\phi(1-\epsilon)]} \left( 1 - 2 e \cos[\phi(1-\epsilon)] + e^2\{1-\epsilon(2-\epsilon)\sin^2[\phi(1-\epsilon)]\} \right)^{1/2} \]The instantaneous velocity as a function of \(\phi\) is:
\[ v = \sqrt{ \left(\frac{G M}{a (1 - e^2)}\right) \left( 1 - 2 e \cos[\phi(1-\epsilon)] + e^2\{1-\epsilon(2-\epsilon)\sin^2[\phi(1-\epsilon)]\} \right) } \tag{2d} \]Relativistic Correction Parameter
From the previous chapter:
\[ \epsilon = \frac{3 (G M)^2}{c^2 L^2} = \frac{3 (G M)^2}{c^2 aGM(1-e^2)} = \frac{3 G M}{c^2 a (1 - e^2)} \]Here:
\[ \epsilon = \frac{3 (G M)^2}{c^2 L^2} = \frac{3 (G M)^2}{c^2 (v_{x0}R_{earth})^2} = \frac{3c^2}{v_{x0}^2} \left( \frac{G M}{c^2 R_{earth}} \right)^2 \tag{2e} \]Geometric Relations
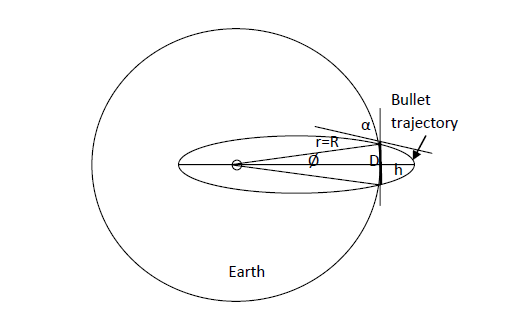
To zoom in a bit further:
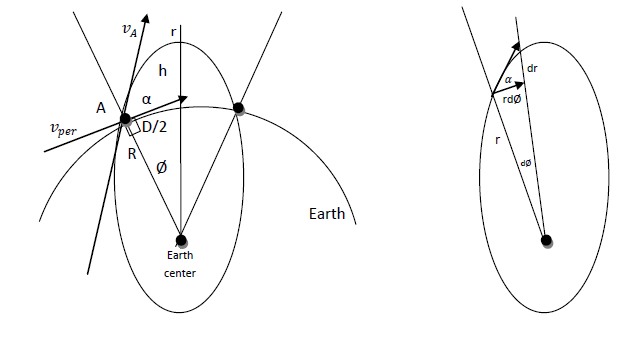
\[ \phi \cdot R = \frac{D}{2} \quad \Rightarrow \quad \phi = \frac{D}{2R} \] \[ v_{\text{per}} = v_{xA} = v \cos(\alpha) \quad\text{and}\quad v_{yA} = v \sin(\alpha) \]
From (2a): \[ a(1 - e^{2}) = r\{1 - e\cos[\phi(1 - \epsilon)]\} \]
From (2d):
\[ v = \sqrt{ \left(\frac{GM}{a(1 - e^{2})}\right) \left( 1 - 2e\cos[\phi(1-\epsilon)] + e^{2}\{1 - \epsilon(2-\epsilon)\sin^{2}[\phi(1-\epsilon)]\} \right) } \] \[ v^{2} = \left(\frac{GM}{a(1 - e^{2})}\right) \left( 1 - 2e\cos[\phi(1-\epsilon)] + e^{2}\{1 - \epsilon(2-\epsilon)\sin^{2}[\phi(1-\epsilon)]\} \right) \] \[ v^{2} = GM\, \frac{ 1 - 2e\cos[\phi(1-\epsilon)] + e^{2}\{1 - \epsilon(2-\epsilon)\sin^{2}[\phi(1-\epsilon)]\} }{ r\{1 - e\cos[\phi(1-\epsilon)]\} } \] \[ \frac{v^{2} r}{GM}\{1 - e\cos[\phi(1-\epsilon)]\} = 1 - 2e\cos[\phi(1-\epsilon)] + e^{2}\{1 - \epsilon(2-\epsilon)\sin^{2}[\phi(1-\epsilon)]\} \] \[ e^{2}\{1 - \epsilon(2-\epsilon)\sin^{2}[\phi(1-\epsilon)]\} - e\cos[\phi(1-\epsilon)]\left(2 - \frac{v^{2}r}{GM}\right) + \left(1 - \frac{v^{2}r}{GM}\right) = 0 \]
\[ e = \frac{ \cos[\phi(1-\epsilon)]\left(2 - \frac{v^{2}r}{GM}\right) }{ 2\{1 - \epsilon(2-\epsilon)\sin^{2}[\phi(1-\epsilon)]\} } \pm \]
\[ \pm \frac{ \sqrt{ \left[\cos[\phi(1-\epsilon)]\left(2 - \frac{v^{2}r}{GM}\right)\right]^{2} - 4\left(1 - \frac{v^{2}r}{GM}\right) \{1 - \epsilon(2-\epsilon)\sin^{2}[\phi(1-\epsilon)]\} } }{ 2\{1 - \epsilon(2-\epsilon)\sin^{2}[\phi(1-\epsilon)]\} } \]
At the starting point where the trajectory intersects the Earth’s surface, we have \( r = R \) (with \(R\) the Earth’s radius) and \( \phi = D/(2R) \).
From (2a):
\[ r = \frac{a(1 - \epsilon^{2})}{1 - e\cos[\phi(1-\epsilon)]} \] \[ a(1 - \epsilon^{2}) = R\{1 - e\cos[\tfrac{D}{2R}(1-\epsilon)]\} \] \[ a = \frac{ R\{1 - e\cos[\tfrac{D}{2R}(1-\epsilon)]\} }{ 1 - \epsilon^{2} } \tag{3} \]
\[ e = \frac{ \cos[\phi(1-\epsilon)]\left(2 - \frac{v^{2}r}{GM}\right) }{ 2\{1 - \epsilon(2-\epsilon)\sin^{2}[\phi(1-\epsilon)]\} } \pm \]
\[ \pm \frac{ \sqrt{ \left[\cos[\phi(1-\epsilon)]\left(2 - \frac{v^{2}r}{GM}\right)\right]^{2} - 4\left(1 - \frac{v^{2}r}{GM}\right) \{1 - \epsilon(2-\epsilon)\sin^{2}[\phi(1-\epsilon)]\} } }{ 2\{1 - \epsilon(2-\epsilon)\sin^{2}[\phi(1-\epsilon)]\} } \]
Or, using equations (2), (2e), and (3):
\[ R\{1 - e\cos[\tfrac{D}{2R}(1-\epsilon)]\} = a(1 - e^{2}) = \frac{L^{2}}{GM} \]
\[ e = \frac{1 - \frac{L^{2}}{RGM}} {\cos[\tfrac{D}{2R}(1-\epsilon)]} = \frac{ 1 - \frac{L^{2}}{RGM} }{ \cos\!\left[ \frac{D}{2R} \left( 1 - \frac{3c^{2}}{v_{x0}^{2}} \left(\frac{GM}{c^{2}R_{\text{earth}}}\right)^{2} \right) \right] } = \frac{ 1 - \frac{(v_{x0}R)^{2}}{RGM} }{ \cos\!\left[ \frac{D}{2R} \left( 1 - \frac{3c^{2}}{v_{x0}^{2}} \left(\frac{GM}{c^{2}R_{\text{earth}}}\right)^{2} \right) \right] } \]
The given velocity at the point \( r = R \) is \( v \). Thus, for a given velocity, there are two possible solutions for \( e \).
Here, \( h \) is the maximum height of the projectile: \[ h = a(1 + e) - R \]
Together with (3): \[ h = \frac{ R\{1 - e\cos[\tfrac{D}{2R}(1-\epsilon)]\} }{ 1 - e^{2} }(1 + e) - R = R\left\{ \frac{ 1 - e\cos[\tfrac{D}{2R}(1-\epsilon)] }{ 1 - e } - 1 \right\} \] \[ h = R\left\{ \frac{ 1 - e\cos[\tfrac{D}{2R}(1-\epsilon)] - 1 + e }{ 1 - e } \right\} = R\frac{ e\left(1 - e\cos[\tfrac{D}{2R}(1-\epsilon)]\right) }{ 1 - e } \]
Here, \(D\) is the horizontal distance, \(v\) the launch speed, and \(R\) the Earth’s radius. As shown above: \[ \phi = \frac{D}{2R}. \]
Or, more pragmatically, in our projectile example with \(v_{x0}\) and \(D\) as inputs:
\[ h = a(1 + e) - R = a\frac{1 - e^{2}}{1 - e} - R = \frac{L^{2}}{GM}\frac{1}{1 - e} - R \]
\[ = \frac{v_{x0}^{2}R^{2}}{GM}\frac{1}{1 - e} - R \]
Where: \[ e = \frac{ 1 - \frac{v_{x0}^{2}R}{GM} }{ \cos\!\left[ \frac{D}{2R} \left( 1 - \frac{3c^{2}}{v_{x0}^{2}} \left(\frac{GM}{c^{2}R}\right)^{2} \right) \right] } \]
Derivation of the circumference of an ellipse
\[ \frac{x^{2}}{a^{2}} + \frac{y^{2}}{b^{2}} = 1, \qquad x = a\cos\beta,\quad y = b\sin\beta \]
\[ \text{Circumference} = 4a \int_{0}^{\pi/2} \sqrt{ \left(\frac{dx}{d\beta}\right)^{2} + \left(\frac{dy}{d\beta}\right)^{2} } \, d\beta \]
\[ = 4a \int_{0}^{\pi/2} \sqrt{ a^{2}\sin^{2}\beta + b^{2}\cos^{2}\beta } \, d\beta \]
\[ = 4a \int_{0}^{\pi/2} \sqrt{ a^{2}(1 - \cos^{2}\beta) + b^{2}\cos^{2}\beta } \, d\beta \]
\[ = 4a \int_{0}^{\pi/2} \sqrt{ a^{2} - (a^{2} - b^{2})\cos^{2}\beta } \, d\beta \]
\[ \text{Circumference} = 4a \int_{0}^{\pi/2} \sqrt{ 1 - e^{2}\cos^{2}\beta } \, d\beta \]
There is no simple closed-form expression for the circumference of an ellipse. A well‑known approximation is Ramanujan’s formula:
\[ \text{Circumference} \approx \pi a\left[ 3(1 + \sqrt{1 - e^{2}}) - \sqrt{10\sqrt{1 - e^{2}} + 3(2 - e^{2})} \right] \]
Summary of formulas used
The starting points for this derivation are the projectile’s tangential velocity along the Earth’s surface (\(v_{x0} = v_{\text{per}}\), perpendicular to \(r\)) and the required distance \(D\). Thus, at the launch point we know the position and momentum of the projectile and can compute the full trajectory.
- \( L = v_{x0} R_{\text{Earth}} \quad\Rightarrow\quad \epsilon = \epsilon(L(v_{x0})) \)
- \( \epsilon = \dfrac{3(GM)^{2}}{2c^{2}L^{2}} \quad\Rightarrow\quad \epsilon(v_{x0}) \)
- \( \phi = \dfrac{D}{2R} \quad\Rightarrow\quad \phi(D) \)
- \( e = \dfrac{1 - \frac{L^{2}}{RGM}}{\cos[\phi(1 - \epsilon)]} \quad\Rightarrow\quad e(v_{x0},D) \)
- \( \alpha = \arctan\!\left(\dfrac{e(1 - \epsilon)\sin[\phi(1 - \epsilon)]}{1 - e\cos[\phi(1 - \epsilon)]}\right) \)
- \( a = \dfrac{L^{2}}{GM(1 - e^{2})} \quad\Rightarrow\quad a(v_{x0},D) \)
- \( h = a(1 + e) - R \quad\Rightarrow\quad h(v_{x0},D) \)
With these formulas, the full relativistic trajectory and maximum height can be computed from the launch speed and required distance.
Detailed calculation results
Detailed results for the example above. The starting parameters are the projectile’s tangential velocity (perpendicular to \(r\)) and the required horizontal distance.
| Newton | Schwarzschild | |||||||
|---|---|---|---|---|---|---|---|---|
| Parameter | 5 m/s | 500 m/s | 500 m/s | 1000 m/s | 5 m/s | 500 m/s | 500 m/s | 1000 m/s |
| Distance (m) | 10 | 10 | 2000 | 2000 | 10 | 10 | 2000 | 2000 |
| vr0 (m/s) | 9.87 | 0.10 | 19.73 | 9.87 | 9.76 | 0.10 | 19.66 | 9.71 |
| Speed (m/s) | 11 | 500 | 500 | 1000 | 11 | 500 | 500 | 1000 |
| \(\epsilon\) | - | - | - | - | 5.25×10-3 | 5×10-7 | 5.25×10-7 | 1×10-7 |
| e (eccentricity) | – | – | – | – | 1.000 | 0.996 | 0.996 | 0.984 |
| a (m) | – | – | – | – | 3.18×106 | 3.18×106 | 3.18×106 | 3.20×106 |
| h (m) | 4.93 | 4.93×10-4 | 19.73 | 4.93 | 4.88 | 4.91×10-4 | 19.66 | 4.85 |
| α (rad) | 1.10 | 0.000 | 0.04 | 0.010 | 1.10 | 0.000 | 0.04 | 0.010 |
| α (deg) | 63.13 | 0.0113 | 2.26 | 0.565 | 62.88 | 0.0113 | 2.25 | 0.556 |
| Φ (rad) | – | – | – | – | 7.87×10-7 | 7.87×10-7 | 1.57×10-4 | 1.57×10-4 |
| L (angular momentum) | 3.18×107 | 3.18×109 | 3.18×109 | 6.36×109 | 3.18×107 | 3.18×109 | 3.18×109 | 6.36×109 |
| cos(α) | 0.4520 | 1.0000 | 0.9992 | 1.0000 | 0.4558 | 1.0000 | 0.9992 | 1.0000 |
| cos(α + Φ) | – | – | – | – | 0.4558 | 1.000 | 0.9992 | 1.000 |
| Circumference (km) | - | - | - | - | 12662 | 12894 | 12894 | 13346 |
3) Analysis of the Results
Height Differences
In the classical case, the maximum height of the projectile is \( h \approx 4.93\,\text{m} \) at low speeds. In the Schwarzschild approach this height is slightly lower (for example \( h \approx 4.88\,\text{m} \)), indicating a stronger effective gravitational field.
Eccentricity
An eccentricity of exactly \( e = 1 \) corresponds to the classical parabolic trajectory. The Schwarzschild approach shows that the trajectories become slightly elliptical with \( e < 1 \). For a horizontal velocity of 500 m/s we find \( e \approx 0.996 \), while at 5 m/s \( e \approx 1 \), consistent with an almost parabolic path.
Direction Angle
The deviation in direction angle \( \Phi \) is extremely small at low speeds, but measurable at higher energies. For a projectile of 500 m/s over 2 km, the deviation is \( \Phi \approx 1.57 \times 10^{-4}\,\text{rad} \), corresponding to a precession of the ellipse axis.
Angular Momentum and Orbit Circumference
The angular momentum \( L \) increases with the initial velocity. The corresponding (approximate) circumference of the elliptical orbit also increases, reflecting the longer path travelled by a high‑energy projectile.
4.8.3 Conclusion
- Newtonian ballistics is an excellent approximation for everyday situations.
- Relativistic corrections are subtle but essential for high‑precision applications and high velocities.
- The Schwarzschild approach shows that even a simple projectile trajectory is, in principle, influenced by the curvature of spacetime.