Derivations, Applications and Considerations – by Albert Prins
Part V – Coordinates and Formal Analysis
5 Coordinate Systems
5.1 Rectangular (Cartesian) Coordinate System
To distinguish between points in space, a coordinate system is created.
The main characteristics of a coordinate system are the origin and the
coordinate axes. The origin can be chosen based on what is most practical,
and for the axes, a Cartesian system is usually chosen because of its simplicity
and mathematical convenience.
In a Cartesian coordinate system:
The axes are perpendicular (orthogonal) to each other.
The axes are independent of each other, i.e., changing the value of one coordinate does not affect the others.
The axes have direction and magnitude and can therefore be considered as vectors.
A point in space is represented by its coordinates, for example
\( A(x_a, y_a) \).
The \( x_a \) can be found by drawing a line parallel to the y-axis;
where that line intersects the x-axis lies the point \( x_a \). The same applies to \( y_a \).
The distance from point A to the origin can be found using Pythagoras:
The advantage is that the length of the line segment is independent of the chosen origin;
i.e., the values of \( x_a, y_a, x_b, y_b \) may change,
but the difference \( |A - B| \), which is the length of the segment, does not.
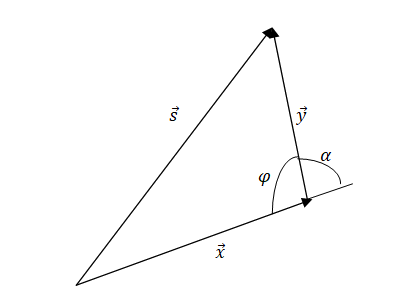
5.2 Non-Orthogonal Coordinate System
For practical reasons, a coordinate system can also be chosen in which the axes are not
orthogonal. Positions and distances can still be described in such a system, but the
calculations become somewhat more complex.
A line segment \( s \) in this system is the sum of the basis vectors:
This is the well-known cosine rule.
Thus, in addition to the squares of the coordinates, the product of the coordinates also appears in the
equation.
5.3 Curved Coordinates
Instead of coordinate axes that are not orthogonal, it may also be practical to use
curved coordinates. Working with these coordinates is naturally more complex,
but Einstein used the following approach:
A curved line can be considered as a line composed of infinitely small straight
segments. By looking at an infinitesimally small region, these curved coordinates
can be treated as a local coordinate system with straight (linear) coordinates,
which are not necessarily rectangular.
Because the coordinate system here involves infinitesimal coordinates, they are
denoted as \( dx, dy \), etc. Moreover, these coordinates have coefficients,
and these coefficients contain information about the curvature of the coordinate
systems. In the case of curvature, these coefficients are therefore no longer constants,
but parameters that depend on their position along the coordinate systems.
It is said that gravity bends coordinate systems and thereby deforms spacetime,
creating a gravitational field and thus causing acceleration. However,
by choosing a curved coordinate system that moves and bends along with the
gravitational field, no force or gravity is experienced;
in the same way as in special relativity a moving coordinate system was chosen
to neutralize the velocity of the moving object.
5.4 General Form for a Coordinate System
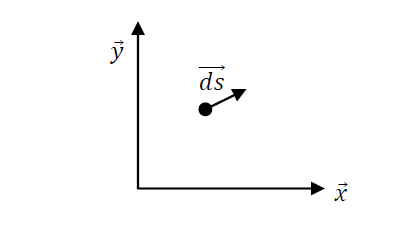
Let us derive an expression for the relation between a line segment and its curved
coordinate system.
As mentioned earlier, an infinitesimal line segment \( d\vec{s} \) is a vector, and its magnitude
can be calculated as shown above:
Here you can see that \( g_{\mu\nu} \) acts as the “weighting factor” that determines how the
infinitesimal displacements in the \( \mu \)- and \( \nu \)-directions contribute to
the length.
The diagonal elements \( g_{\mu\mu} \) can be viewed as the “scale factors” for the corresponding coordinate direction.
The off-diagonal elements \( g_{\mu\nu} \) with \( \mu \neq \nu \) describe whether the coordinate directions are skew (i.e., not perpendicular).
In a sense, they are related to direction cosines (projections of one axis onto another).
Summary
A coordinate system is a tool to structure space; distances can be calculated within it.
In orthogonal systems, Pythagoras applies; in non-orthogonal systems, the cosine rule applies.
Curved coordinate systems are required to describe gravitational fields in general relativity.
The metric \( g_{\mu\nu} \) contains all information about distance measurement and curvature of space or spacetime.
5.6 Transformation between Two Coordinate Systems
As mentioned earlier, in a curved coordinate system one can locally, within an
infinitesimally small region, use a coordinate system with straight lines.
For a four-dimensional coordinate system, each new coordinate in the
new \( x \)-system has a linear relation with all old coordinates in the
old \( y \)-system, according to:
The summation is performed over the repeated index \( r \). This implies summation
over the index \( r \) according to Einstein notation. This means that for each value of
\( m \), the derivatives over all values of \( r \) (from 0 to 3) are added.
This formula describes how an infinitesimal change in the new
coordinate system \( x^{m} \) is constructed from changes in the old system
\( y^{r} \).
5.6.1 Extended Explanation of the Metric Tensor
We begin with a Cartesian coordinate system, which in this case is comparable to
the Minkowski equation (see chapter 5.10.1 and
Appendix 9.1
equation (35)) in
special relativity:
Now we consider an arbitrary coordinate system \( y^{\alpha} \), with coordinates
\( y^{0}, y^{1}, y^{2}, y^{3} \). The relation between the old and the new system is
given by the chain rule:
This formula describes how the components of the metric tensor transform under
a general coordinate transformation. It is a fundamental result in general relativity
and forms the basis for understanding curved spacetime.
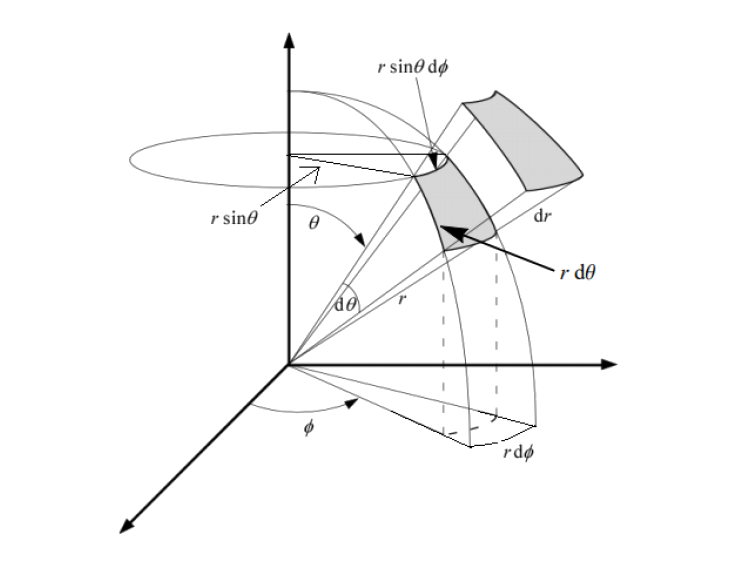
5.7 Transformation between Cartesian and Polar (Infinitesimal) Coordinates
As an example, we now perform the transformation from a Cartesian to a spherical
(polar) coordinate system. We assume that the reader is familiar with the standard transformation
between the two systems:
\begin{equation}
x = r\sin\theta\cos\varphi,\qquad
y = r\sin\theta\sin\varphi,\qquad
z = r\cos\theta.
\end{equation}
Derivation of \( dx, dy, dz \)
We differentiate the above expressions to obtain the infinitesimal displacements:
This corresponds to the metric of a polar coordinate system in a three-dimensional space.
Conclusion
Applying the metric transformation formula to the transition from Cartesian to
spherical coordinates leads to the expected spherical form of the spacetime metric.
This exercise illustrates how tensor transformations guarantee the coordinate invariance
of physical laws within general relativity.
5.9 Further Considerations on Co- and Contravariant Transformations
5.9.1 Introduction
In this section, we investigate how basis vectors and vector components transform under
a coordinate transformation. We examine both the direct and the inverse transformation
and verify their consistency. These considerations form the basis for understanding
covariant and contravariant objects in tensor analysis.
5.9.2 Covariant Transformation of Basis Vectors and Dual Vectors (One-Forms)
Consider a two-dimensional vector space with original basis vectors
\( e_{1} \) and \( e_{2} \), which are transformed to a new
coordinate system with basis vectors \( e_{1}' \) and \( e_{2}' \).
This transformation is linear and can be written as:
5.9.2.1 Inverse Transformation of the Basis Vectors
To find the inverse transformation (from the transformed to the original system),
we solve for \( e_{1} \) and \( e_{2} \) in terms of
\( e_{1}' \) and \( e_{2}' \).
Step 1: Construct a linear combination
We take combinations of the original transformations to isolate \( e_{1} \):
We have derived the covariant transformation for basis vectors and its inverse in
a two-dimensional space. We verified that the transformation and its inverse
cancel each other to the identity matrix, confirming the consistency of the transformation between
basis vectors in different coordinate systems. This formal consistency
is essential for correctly applying tensor transformations in general
relativity.
5.9.3 Contravariant Transformation of Vector Components
In differential geometry, it is essential to distinguish between how
basis vectors (covariant) and how vector components (contravariant)
transform under a coordinate transformation. In this section, we examine the
transformation properties of contravariant vector components in a two-dimensional
space.
Vector invariance and component transformation
A vector \(V\) remains geometrically the same under a coordinate transformation,
but its components change.
In the original coordinate system, we write:
\begin{equation}
V = V_{1} e_{1} + V_{2} e_{2},
\end{equation}
and in the new (transformed) system:
\begin{equation}
V = V_{1'} e_{1}' + V_{2'} e_{2}'.
\end{equation}
Since the vector itself remains invariant, the components \(V_{i}\) must change
when the basis vectors change.
Change of basis
The new basis vectors are linearly related to the original basis vectors via
a matrix \(A\):
While the relation between the components
\(\begin{pmatrix}V_{1} \\ V_{2}\end{pmatrix}\)
and
\(\begin{pmatrix}V'_{1} \\ V'_{2}\end{pmatrix}\)
is given by the transposed matrix:
When the coordinate system changes, the basis vectors transform according to a
matrix \(A\), while the vector components transform with the inverse transpose
\((A^{-1})^{T}\).
This contravariant transformation ensures that the vector \(V\) itself remains invariant:
its representation adapts to the changing basis so that its geometric
meaning is preserved.
5.10 Considerations on the Minkowski and Schwarzschild Formulas
5.10.1 Minkowski Space
The Minkowski metric is used within special relativity, where the
effects of gravity and acceleration are neglected. In this context,
reference frames move uniformly with constant velocity relative to one another, and the
coordinate system used is linear and flat.
Consider a point \(K\) in spacetime with its own coordinate system.
In this system, \(K\) is always located at the origin, so only time
progresses. The spacetime distance — the interval — is then given by:
\begin{equation}
s = c\,\tau,
\end{equation}
where \( \tau \) is the proper time, measured by a clock moving with \(K\).
An observer is located elsewhere in spacetime with another inertial frame,
moving relative to \(K\). If the observer perceives that \(K\)
moves through space, then the measured velocity of \(K\) is:
This differential segment can be viewed as a tangent to the worldline in spacetime.
Even if the worldline is curved (as in acceleration or in the presence of
gravity), it can locally be approximated as composed of linear segments.
The coordinates \(t, x, y, z\) represent four components of a
spacetime vector. In an orthogonal coordinate system (as in Minkowski space),
the interval can be computed using a generalized Pythagorean theorem.
If we take the time component as imaginary \(ict\), and the spatial components as
real, we obtain the familiar Minkowski form.
General structure of the interval
We must recognize that \(t, x, y, z\) have magnitude and direction; they are vectors.
Finding the magnitude of \(s\) means adding the four vectors.
If this coordinate system is orthogonal, the Pythagorean theorem
can be applied to the spatial part.
If we treat the time part as complex \(ic\,dt\), and for the left-hand side
\(ds = ic\,d\tau\), then by squaring the coordinates we obtain the
Minkowski formula.
In two dimensions we can write:
\begin{equation}
s = a_{1}x_{1} + a_{2}x_{2}.
\end{equation}
To find the magnitude of \(s\), we compute the inner product of \(s\) with itself:
\begin{equation}
s \cdot s
= (a_{1}x_{1} + a_{2}x_{2}) \cdot (a_{1}x_{1} + a_{2}x_{2}),
\end{equation}
When using a locally orthogonal coordinate system, all products
with \( \mu \neq \nu \) vanish.
If only an infinitesimally small local region is considered, \(dx\) replaces
\(x\), and similarly for the other coordinates.
Finally, the equation results in a Minkowski or Schwarzschild form:
Since \( \gamma \ge 1 \), we have \( d\tau \le dt \):
a moving clock runs slower than a clock at rest from the perspective of an
external observer.
5.10.2 Transformations performed by Schwarzschild
The Schwarzschild metric extends the Minkowski metric by also
accounting for the effects of mass and gravity. In contrast to the flat
spacetime of special relativity, this leads to a curved
spacetime. This curvature is reflected in a non-linear coordinate system,
adapted to the spherical symmetry around a massive body.
From Cartesian to spherical
Schwarzschild begins with the usual flat (Cartesian) coordinates and performs a
transformation to spherical coordinates \(r, \theta, \varphi\).
This results in the following expression for the spacetime interval
(in natural units \(G=c=1\), but here we keep \(c\) explicit):
However, Einstein preferred in his field equations that in suitable coordinates
\(g = -1\) (as in the Minkowski metric).
Schwarzschild therefore investigates whether there exists a coordinate transformation
that satisfies this condition.
Transformation to new coordinates
(Next step: here you can introduce the Schwarzschild radial transformation, such as
\(R^{3} = r^{3} + \alpha^{3}\), or isotropic coordinates, depending on how you wish to proceed.)
To normalize the determinant to \( g = -1 \), Schwarzschild defines new
coordinates \(x_{1}, x_{2}, x_{3}\), based on:
\begin{equation}
g = g_{00}\cdot g_{11}\cdot g_{22}\cdot g_{33} = -1.
\end{equation}
Exactly as desired.
The transformation performed by Schwarzschild is therefore valid and results in a metric
with determinant \(-1\), despite the curved nature of spacetime.
Special cases
In the specific case \( \theta = 90^\circ \), we have \( \cos\theta = 0 \) and thus
\( x_{2} = 0 \), which leads to:
In this plane around the equatorial region, the metric simplifies further.
5.11 Schwarzschild’s: “On the Gravitational Field of a Mass Point According to Einstein’s Theory”
Karl Schwarzschild’s goal in his 1916 paper was to find an exact
solution to the Einstein field equations in vacuum. This solution describes the
spacetime around a point mass moving along a geodesic in a
four-dimensional manifold, where the spacetime interval \(ds\) plays a central role.
Conditions for the solution
The following conditions are imposed on the solution:
Time independence:
All components of the metric are independent of the time coordinate \(x^{4}\).
No spacetime coupling:
The mixed components \(g_{\rho 4} = g_{4\rho} = 0\) for \(\rho = 1,2,3\).
Spherical symmetry:
The solution is invariant under orthogonal transformations (rotations) of
\(x_{1}, x_{2}, x_{3}\); this reflects spherical symmetry.
Asymptotic flatness:
At infinite distance, the components of the metric tensor approach:
Since the determinant of the metric is not equal to \(-1\) in this case,
Schwarzschild performs a transformation to new variables that satisfy this condition.
He defines:
By substituting this metric into the Einstein field equations and solving in
vacuum (\(T_{\mu\nu} = 0\)), Schwarzschild obtained the well-known solution:
This equation describes the curved spacetime around a spherically symmetric
point mass in vacuum. Although Schwarzschild began his derivation with Cartesian
coordinates, the final solution is more convenient and insightful in spherical coordinates,
given the spherical symmetry of the problem.
Schwarzschild solution in Cartesian coordinates
There also exists a less common form of the Schwarzschild solution in
Cartesian coordinates, given by:
This form is rarely practical, since spherical coordinates are much better suited to the
symmetry of the problem, for example in applications such as describing black holes
or the exterior of stars.
Sources
K. Schwarzschild, On the Gravitational Field of a Point-Mass, According to Einstein's Theory, January 13, 1916.
G. Oas, various discussions and analyses of the Schwarzschild solution. See also the Bibliography chapter at the end of this document.
The Schwarzschild solution is a cornerstone of general relativity and
is widely applied in astrophysics in the study of black holes,
neutron stars, and other objects with extremely strong gravitational fields.